usample
Generate random samples of uncertain variables in a Simulink model
Description
Use this function to generate random samples of uncertain variables in a Simulink® model that contains Uncertain State Space blocks. Such sampling lets you perform Monte Carlo analysis of the model response.
To generate random samples from uncertain elements and models such as
uss, ufrd, genss, or
genfrd models, use usample.
uvals = usample(uvars)uvars. This structure lists the uncertain variables in a Simulink model that contains Uncertain State Space blocks. To obtain the
input uvars, for a particular Simulink model, use ufind. The resulting structure
uvals has fields whose names are the uncertain variable names and
values are the corresponding samples. To apply the sampled values when you simulate the
model, set the Uncertainty value parameter of the Uncertain
State Space block to uvars.
Examples
Generate random samples of uncertain variables in a Simulink model.
Open the model.
open_system('usim_model')
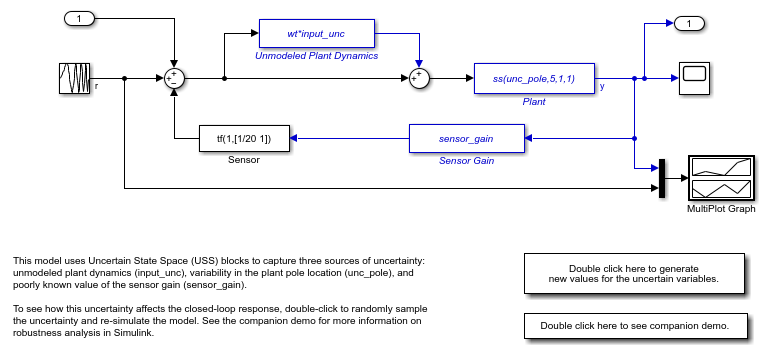
The model contains three Uncertain State Space blocks named Unmodeled Plant Dynamics, Plant, and Sensor Gain. Each of these blocks is preconfigured with an uncertain system variable that depends on an uncertain element, as follows.
Unmodeled plant dynamics: a
ultidynelement namedinput_uncPlant: a
urealelement calledunc_poleSensor gain: a
urealelement calledsensor_gain
Create a structure of these uncertain elements using ufind. This command finds all Uncertain State Space blocks and uncertain variables in the model.
uvars = ufind('usim_model');
uvars
uvars =
struct with fields:
input_unc: [1×1 ultidyn]
sensor_gain: [1×1 ureal]
unc_pole: [1×1 ureal]
The field names and values of uvars correspond to the uncertain elements in the three Uncertain State Space blocks. To simulate the model at random values of these variables, use usample to generate the values in a structure.
uval = usample(uvars)
uval =
struct with fields:
input_unc: [1×1 ss]
sensor_gain: 0.2853
unc_pole: -8.3290
Each field of uval contains the corresponding sample value. The randomly chosen values of the ureal elements are real scalar values. The random sample of the ultidyn element is a state-space model.
To simulate the model using these random values, set the Uncertainty value parameter of each Uncertain State Space block to uval. In usim_model this parameter is already set. Therefore, when you simulate the model, Simulink applies the values in uval to the uncertain variables in the model.
sim('usim_model')
For Monte Carlo analysis, you can use a for loop to repeatedly sample the variables and simulate the model.
for i=1:10; uval = usample(uvars); sim('usim_model',10); end

The MultiPlot Graph block displays the simulated responses.
Input Arguments
Output Arguments
Version History
Introduced in R2009b