Blank Message
Create blank ROS 2 message using specified message type
Libraries:
ROS Toolbox /
ROS 2
Description
The Blank Message block creates a Simulink® nonvirtual bus corresponding to the selected ROS message type. The block creates ROS message buses that work with Publish, Subscribe, Call Service and Send Action Goal blocks.
Examples
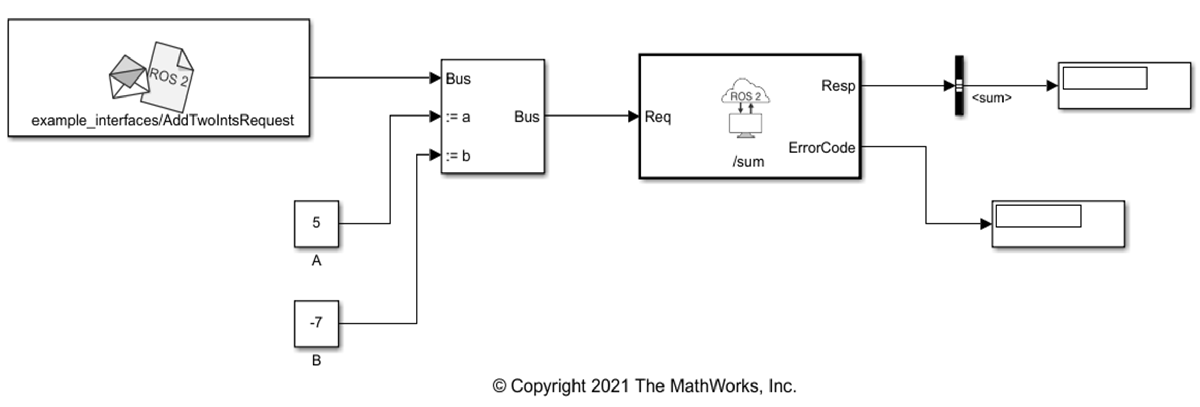
Call ROS 2 Service in Simulink
Call a service on the ROS 2 network in Simulink using the Call Service block and receive a response.
Ports
Output
Parameters
Extended Capabilities
Version History
Introduced in R2019b