Image
(To be removed) Create image message
Image object will be removed in a future release. Use message structure format
when you create ROS messages using the rosmessage function, by specifying the Dataformat
name-value argument as "struct". You can use rosReadImage and rosWriteImage functions to read and write image data from ROS messages
respectively. For more information, see ROS Message Structure Functions.
Description
The Image object is an implementation of the
sensor_msgs/Image message type in ROS. The object contains the
image and meta-information about the message. You can create blank
Image messages and populate them with data, or subscribe to image
messages over the ROS network. To convert the image to a MATLAB® image, use the readImage
function.
Creation
Description
msg = rosmessage('sensor_msgs/Image') creates an
empty Image object. To specify image data, use the
msg.Data property. You can also get these image
messages off the ROS network using rossubscriber.
Properties
Object Functions
readImage | (To be removed) Convert ROS image data into MATLAB image |
writeImage | (To be removed) Write MATLAB image to ROS image message |
Examples
Read and write a sample ROS Image message by converting it to a MATLAB image. Then, convert a MATLAB® image to a ROS message.
Load sample ROS messages and inspect the image message data. The img object is a sample ROS Image message object.
exampleHelperROSLoadMessages img
img =
ROS Image message with properties:
MessageType: 'sensor_msgs/Image'
Header: [1×1 Header]
Height: 480
Width: 640
Encoding: 'rgb8'
IsBigendian: 0
Step: 1920
Data: [921600×1 uint8]
Use showdetails to show the contents of the message
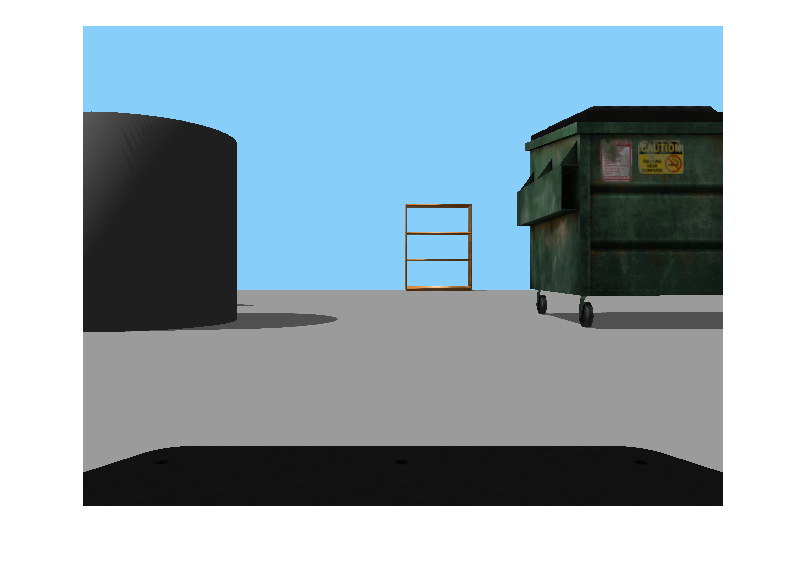
Create a MATLAB image from the Image message using readImage and display it.
I = readImage(img); imshow(I)
Create a ROS Image message from a MATLAB image.
imgMsg = rosmessage('sensor_msgs/Image'); imgMsg.Encoding = 'rgb8'; % Specifies Image Encoding Type writeImage(imgMsg,I) imgMsg
imgMsg =
ROS Image message with properties:
MessageType: 'sensor_msgs/Image'
Header: [1×1 Header]
Height: 480
Width: 640
Encoding: 'rgb8'
IsBigendian: 0
Step: 1920
Data: [921600×1 uint8]
Use showdetails to show the contents of the message
msg = rosmessage('sensor_msgs/Image')msg =
ROS Image message with properties:
MessageType: 'sensor_msgs/Image'
Header: [1×1 Header]
Height: 0
Width: 0
Encoding: ''
IsBigendian: 0
Step: 0
Data: [0×1 uint8]
Use showdetails to show the contents of the message