Ejecución en hardware objetivo
Cree un modelo Simulink® y ejecútelo en su hardware de Raspberry Pi® en tiempo real. Interactúe con su modelo Simulink monitorizando señales y ajustando parámetros en modelos externos.
Apps
| Raspberry Pi Resource Monitor App | Monitor and manage Raspberry Pi resources |
Temas
- Support I2C Communication
Support I2C communication.
- Support SPI Communication
Enable communication with other SPI devices by using the SPI Controller Transfer block from the support package library.
- Asynchronous Serial Communication
Asynchronous serial communication.
- Signal Monitoring and Parameter Tuning
Use external mode simulation, signal monitoring, and parameter tuning with Arduino boards.
Información relacionada
Ejemplos destacados

Communicate with EEPROM Using Raspberry Pi
Use Simulink® Support Package for Raspberry Pi® Hardware to read from and write to an SPI EEPROM.

Read Temperature from TMP102 Sensor Using Raspberry Pi
Illustrates how to use Simulink® Support Package for Raspberry Pi® Hardware to configure and read temperature from a TMP102 sensor.

Auto-Rotate Image Displayed on Raspberry Pi Sense HAT LED Matrix
Develop a Simulink® model to implement an algorithm to read the Accelerometer On-board Sense HAT and control the rotation of the image displayed on the LED matrix.

Control Color of LED Matrix on Raspberry Pi Sense HAT over WebSockets
Use the Simulink® Support Package for Raspberry Pi® Hardware to control the color of an 8x8 LED matrix on Raspberry Pi Sense HAT from a web page over WebSockets.

Stream Images from Raspberry Pi Using Robot Operating System
Stream images captured from a webcam on a Raspberry Pi® board to the host computer using a ROS communication interface. In this example, you stream images from your Raspberry Pi board to your host computer using the ROS Publish blocks. You use the ROS MATLAB® command line interface to display the images on your host computer.

Detect Boundaries of Objects Within Video Using Raspberry Pi
Identify the boundaries of objects in a live video stream on Raspberry Pi® hardware by using a MATLAB Function block with the Simulink® Support Package for Raspberry Pi Hardware. The process of identifying boundaries of objects is known as edge detection. This example implements the Sobel edge detection algorithm to identify the boundaries of the objects.

Implement Image Inversion Algorithm Using Raspberry Pi
Use the V4L2 Video Capture and the SDL Video Display blocks from the Raspberry Pi® block library to implement an image inversion algorithm with a Simulink® model, and to run the model on Raspberry Pi hardware.

Implement Parametric Audio Equalizer Using Raspberry Pi
Use ALSA Audio Playback block from the Raspberry Pi® block library to implement a parametric audio equalizer algorithm with a Simulink® model and to run the model on Raspberry Pi hardware.

Shift Pitch of Audio Signal Using Raspberry Pi
Shift the pitch of an audio signal on Raspberry Pi® hardware by using a MATLAB Function block with the Simulink® Support Package for Raspberry Pi Hardware.

Estimate Direction of Arrival with Linear Array of Microphones Using Raspberry Pi
Use the Simulink® Support Package for Raspberry Pi® Hardware to estimate the Direction of Arrival (DOA) of a sound source using multiple microphone pairs within a linear array using the Raspberry Pi hardware board. A servo motor is used to point towards the sound source based on the estimated DOA.

Build Surveillance Camera Using Android and Raspberry Pi
Use Raspberry Pi® hardware and an Android® device to build a surveillance camera.

Monitor Engine RPM Using Raspberry Pi CAN Blocks
Use Simulink® Support Package for Raspberry Pi® Hardware to monitor vehicle engine RPM and read the data on a web browser.

MODBUS TCP/IP Communication Between Client and Server Devices Using Raspberry Pi Hardware
Use the Simulink® Support Package for Raspberry Pi® Hardware to implement MODBUS® TCP/IP communication between MODBUS client and server devices. It also shows how to communicate between the two devices in four modes of operation, Client Read, Client Write, Server Read, and Server Write.

Publish and Subscribe to Messages on ThingSpeak Using MQTT Blocks on Raspberry Pi
Use the Simulink® Support Package for Raspberry Pi® Hardware to publish a message to a topic from Raspberry Pi in the ThingSpeak™ MQTT broker. This example also shows how to subscribe to a topic and receive a message from the ThingSpeak MQTT broker to Raspberry Pi. For more information on MQTT protocol, see Conceptos básicos de MQTT (ThingSpeak) and Publicar mensajes MQTT y suscribirse a temas de mensajes. In this example, ThingSpeak is the MQTT broker and Raspberry Pi board is the MQTT client (publisher and subscriber).

Control LED Status Using ThingSpeak TalkBack on Raspberry Pi
Use the Simulink® Support Package for Raspberry Pi® Hardware to fetch and execute commands from a ThingSpeak™ TalkBack queue and use them to change the status of an LED onboard a Raspberry Pi hardware board.

Classify Objects Using Deep Learning Algorithm on Raspberry Pi Hardware
Use the Simulink® Support Package for Raspberry Pi® Hardware to deploy a deep learning algorithm that classifies objects using the ResNet-50 convolutional neural network. This pretrained network is 50 layers deep and can classify images into 1000 object categories, such as keyboard, mouse, pencil, and many more. You can experiment with different objects in your surroundings to see how accurately the network classifies images on the Raspberry Pi hardware.

Recognize Handwritten Digits Zero to Nine Using MNIST Data Set on Raspberry Pi Hardware
Use the Simulink® Support Package for Raspberry Pi® Hardware to recognize images of handwritten digits from zero to nine. In this example, a web camera interfaced with a Raspberry Pi hardware board is used to capture images of the handwritten numbers. The algorithm recognizes the digits and then outputs a label for the digit along with its prediction probability.

Perform Predictive Maintenance for Rotating Device Using Machine Learning Algorithm on Raspberry Pi
Use the Simulink® Support Package for Raspberry Pi® Hardware to predict and monitor the health of a rotating device using a machine learning algorithm. You can use this example for predictive maintenance of any rotating device or piece of equipment so that you can fix them before they fail.
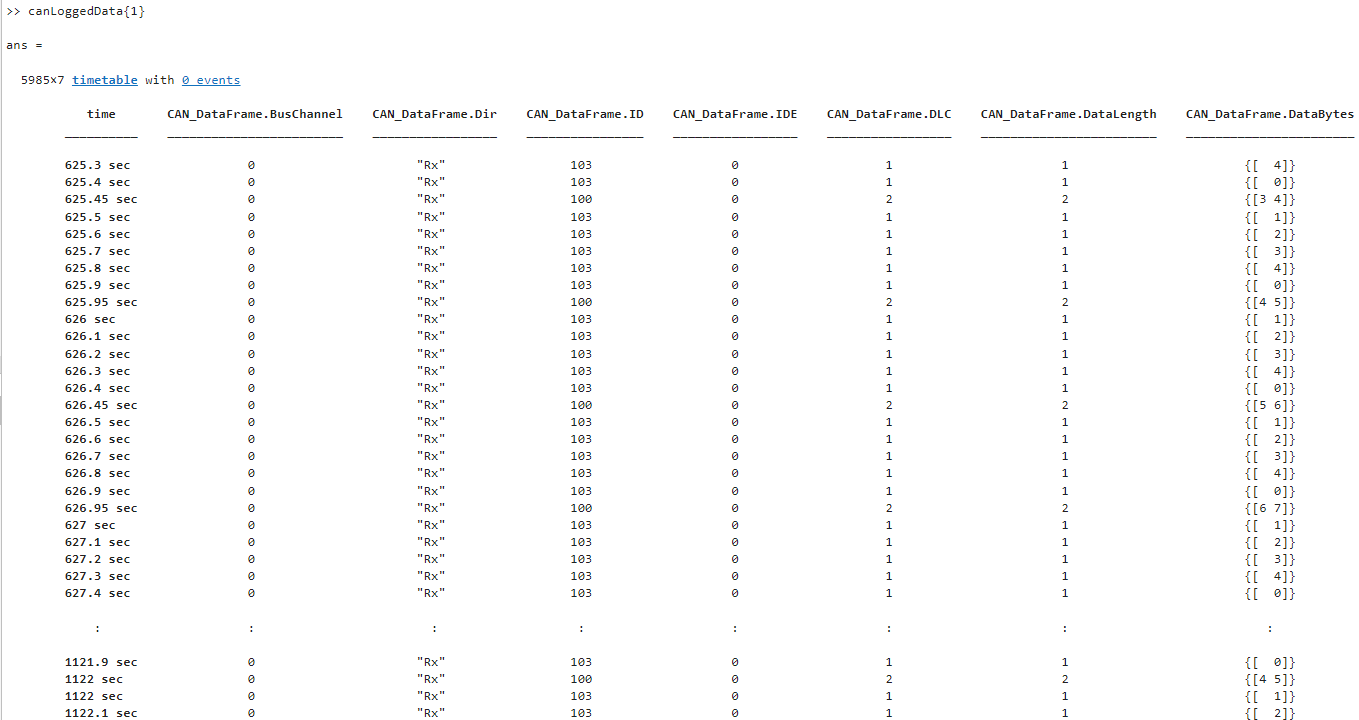
Log CAN Bus Data on Raspberry Pi
Use Simulink® Support Package for Raspberry Pi® Hardware to monitor a controller area network (CAN) bus, perform basic CAN conversions, and log CAN data in a measurable data format (MDF) file. This example also showcases the interoperability between a model deployed in Simulink and a Python program running simultaneously on Raspberry Pi hardware.