Steam Turbine and Governor
(To be removed) Model the dynamics of speed governing system, steam turbine, and multimass shaft
The Specialized Power Systems library will be removed in R2026a. Use the Simscape™ Electrical™ blocks and functions instead. For more information on updating your models, see Upgrade Specialized Power System Models to use Simscape Electrical Blocks.
Libraries:
Simscape /
Electrical /
Specialized Power Systems /
Electrical Machines /
Synchronous Machine Control
Description
The Steam Turbine and Governor block implements a complete tandem-compound steam prime mover, including a speed governing system, a four-stage steam turbine, and a shaft with up to four masses.

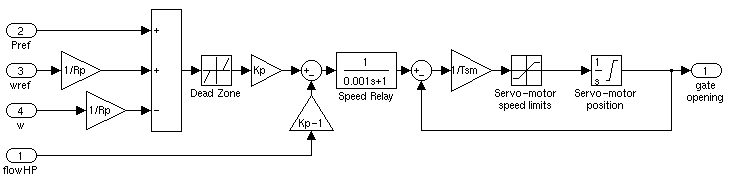
The speed governing system consists of a proportional regulator, a speed relay, and a servomotor controlling the gate opening. It is similar to one of the models proposed in [1].
The steam turbine has four stages, each modeled by a first-order transfer function. The first stage represents the steam chest while the three other stages represent either reheaters or crossover piping. The boiler is not modeled and boiler pressure is constant at 1.0 pu. Fractions F2 to F5 are used to distribute the turbine power to the various shaft stages:

The shaft models a four-mass system, which is coupled to the mass in the Synchronous Machine model for a total of five masses. The machine's mass is labeled mass #1. The mass in the Steam Turbine and Governor block, which is closest to the machine's mass, is mass #2, while the mass farthest from the machine is mass #5. The shaft is characterized by mass inertias H, damping factors D, and rigidity coefficients K. If you choose to simulate a single-mass shaft, the entire four-mass shaft subsystem in the Steam Turbine and Governor block is disabled and all the torque from the turbine is added together and applied to the machine's mass.
Ports
Input
Output
Parameters
References
[1] IEEE committee report, “Dynamic models for steam and hydro turbines in power system studies,” IEEE Transactions on Power Apparatus and Systems, Vol. PAS-92, No. 6, 1973, pp. 1904-1915.
[2] IEEE Subsynchronous resonance working group, “Second benchmark model for computer simulation of subsynchronous resonance,” IEEE Transactions on Power Apparatus and Systems, Vol. PAS-104, No. 5, 1985, pp. 1057-1066.
Extended Capabilities
Version History
Introduced before R2006a