Barometer
Libraries:
UAV Toolbox /
UAV Scenario and Sensor Modeling
Description
The Barometer block models a barometer sensor that generates an air pressure reading with a measurement noise that consists of constant measurement bias, uncorrelated white noise, and correlated noise [1]. For more information on the noise model, see Noise Model.
Examples
Open the barometerSimulation.slx Simulink model
open_system("barometerSimulation");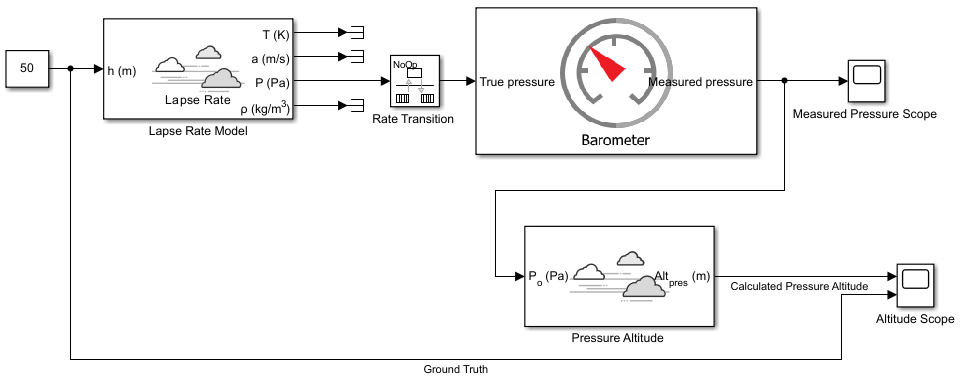
The model consists of the following blocks:
Lapse Rate Model (Aerospace Blockset) — Simulates lapse rate atmospheric model. The block receives altitude in meter, and outputs the atmospheric air pressure in Pascal, which is then measured by the barometer sensor. In this model, the input altitude is 50 meter.
Rate Transition — Simulates the discrete measurement of the Barometer sensor. In this model, the block is configured with a sample time of 0.1 second.
Barometer — Simulates a barometer sensor that generates air pressure reading in Pascal with a measurement noise that consists of constant measurement bias, uncorrelated white noise, and correlated noise.
Pressure Altitude (Aerospace Blockset) — Computes the altitude above mean sea level in meters based on the air pressure reading.
Measured Pressure Scope — Visualizes the pressure reading.
Altitude Scope — Visualizes the computed altitude above mean sea level and ground truth.
Run the model, and then open scope blocks to see the simulation results.


Ports
Input
Output
Parameters
Algorithms
References
[1] Sabatini, A.M., and V. Genovese. “A Stochastic Approach to Noise Modeling for Barometric Altimeters.” Sensors 13 (November 2013): 15692-15707. https://doi.org/10.3390/s131115692
Version History
Introduced in R2025a