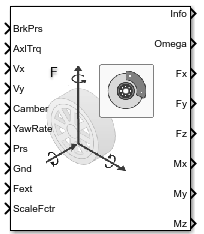
Fiala Wheel 2DOF
Fiala wheel 2DOF wheel with disc, drum, or mapped brake
Libraries:
Vehicle Dynamics Blockset /
Wheels and Tires
Description
The Fiala Wheel 2DOF block implements a simplified tire with lateral and longitudinal slip capability based on the E. Fiala model[1]. The block uses a translational friction model to calculate the forces and moments during combined longitudinal and lateral slip, requiring fewer parameters than the Combined Slip Wheel 2DOF block. If you do not have the tire coefficients needed by the Magic Formula, consider using this block for studies that do not involve extensive nonlinear combined lateral slip or lateral dynamics. If your study does require nonlinear combined slip or lateral dynamics, consider using the Combined Slip Wheel 2DOF block.
The block determines the wheel rotation rate, vertical motion, and forces and moments in all six degrees-of-freedom (DOFs) based on the driveline torque, brake pressure, road height, wheel camber angle, and inflation pressure. You can use this block for these types of analyses:
Driveline and vehicle simulations that require low frequency tire-road and braking forces for vehicle acceleration, braking, and wheel rolling resistance calculations with minimal tire parameters.
Wheel interaction with an idealized road surface.
Ride and handling maneuvers for vehicles undergoing mild combined slip. For this analysis, you can connect the block to driveline and chassis components such as differentials, suspension, and vehicle body systems.
Yaw stability. For this analyses, you can connect this block to more detailed braking system models.
Tire stiffness and unsprung mass interactions with ground variations, load transfer, or chassis motion using the block vertical DOF.
The block integrates rotational wheel, vertical mass, and braking dynamics models. For the slip-dependent tire forces and moments, the block implements the Fiala tire model.
You can set your own user-defined model parameter values or use a built-in tire model.
Use the Tire type parameter to either input tire parameter values or select a fitted tire parameter set.
| Goal | Action |
|---|---|
Input user-defined tire parameter values. | Update the block parameters with user-defined parameter values:
|
Select one of the built-in Fiala tire models to drive the lateral and longitudinal calculations. | Update the applicable block parameters with values from a built-in tire model:
|
Use the Brake Type parameter to select the brake.
| Action | Brake Type Setting |
|---|---|
No braking |
|
Implement brake that converts the brake cylinder pressure into a braking force |
|
Implement simplex drum brake that converts the applied force and brake geometry into a net braking torque |
|
Implement lookup table that is a function of the wheel speed and applied brake pressure |
|
To calculate the rolling resistance torque, specify one of these Rolling Resistance parameters.
| Setting | Block Implementation |
|---|---|
| None |
| Method in Stepwise Coastdown Methodology for Measuring Tire Rolling Resistance. The rolling resistance is a function of tire pressure, normal force, and velocity. |
| Method specified in ISO 28580:2018, Passenger car, truck and bus tyre rolling resistance measurement method — Single point test and correlation of measurement results. |
| Magic formula equations from 4.E70 in Tire and Vehicle Dynamics. The magic formula is an empirical equation based on fitting coefficients. |
| Lookup table that is a function of the normal force and spin axis longitudinal velocity. |
To calculate vertical motion, specify one of these Vertical Motion parameters.
| Setting | Block Implementation |
|---|---|
| Block passes the applied chassis forces directly through to the rolling resistance and longitudinal force calculations. |
| Vertical motion depends on wheel stiffness and damping. Stiffness is a function of tire sidewall displacement and pressure. Damping is a function of tire sidewall velocity and pressure. |
| The block uses the defined sidewall deflection directly in the effective radius calculation. |
Additional Support Package Functionality
If you install the Extended Tire Features for Vehicle Dynamics Blockset support package, you can access these features:
| Feature | Description |
|---|---|
Plot generation | Click the Plot steady state force, moment response button to generate these plots:
|
Import tire parameters | Use the |
Export tire parameters | Use the |
Fit tire model | Use the |
Tire model conversion | Use the
|
You can also access these tire model types:
Light passenger car 205/60R15Light passenger car 245/60R16Mid-size electric passenger car 235/45R18Performance car 225/40R19SUV 265/50R20Light truck 275/65R18Light electric truck HL275/50R22Commercial truck 295/75R22.5Commercial truck (steer) 295/75R22.5Commercial truck (drive) 295/75R22.5Motorcycle (front) 120/70ZR17M/CMotorcycle (rear) 190/55ZR17M/C
For more information, see Get Started with the Extended Tire Features for Vehicle Dynamics Blockset.
Rotational Wheel Dynamics
The block calculates the inertial response of the wheel subject to:
Axle losses
Brake and drive torque
Tire rolling resistance
Ground contact through the tire-road interface
The input torque is the summation of the applied axle torque, braking torque, and moment arising from the combined tire torque.
For the moment arising from the combined tire torque, the block implements tractive wheel forces and rolling resistance with first-order dynamics. The rolling resistance has a time constant parameterized in terms of a relaxation length.
To calculate the rolling resistance torque, you can specify one of these Rolling Resistance parameters.
| Setting | Block Implementation |
|---|---|
| Block sets rolling resistance,
|
| Block uses the method in SAE Stepwise Coastdown Methodology for Measuring Tire Rolling Resistance. The rolling resistance is a function of tire pressure, normal force, and velocity, specifically: |
| Block uses the method specified in ISO 28580:2018, Passenger car, truck and bus tyre rolling resistance measurement method — Single point test and correlation of measurement results. The method accounts for normal load, parasitic loss, and thermal corrections from test conditions, specifically: |
| Block calculates the rolling resistance,
|
| For the rolling resistance,
|
If the brakes are enabled, the block determines the braking locked or unlocked condition based on an idealized dry clutch friction model. Based on the lock-up condition, the block implements these friction and dynamic models.
| If | Lock-Up Condition | Friction Model | Dynamic Model |
|---|---|---|---|
Unlocked | |||
Locked |
The equations use these variables.
| Variable | Value |
|---|---|
| ω | Wheel angular velocity |
| a | Velocity-independent force component |
| b | Linear velocity force component |
| c | Quadratic velocity force component |
| Le | Tire relaxation length |
| J | Moment of inertia |
| My | Rolling resistance torque |
| Ta | Applied axle torque |
| Tb | Braking torque |
| Td | Combined tire torque |
| Tf | Frictional torque |
| Ti | Net input torque |
| Tk | Kinetic frictional torque |
| To | Net output torque |
| Ts | Static frictional torque |
| Fc | Applied clutch force |
| Fx | Longitudinal force developed by the tire road interface due to slip |
| Reff | Effective clutch radius |
| Ro | Annular disk outer radius |
| Ri | Annular disk inner radius |
| Re | Effective tire radius while under load and for a given pressure |
| Vx | Longitudinal axle velocity |
| Fz | Vehicle normal force |
| Cr | Rolling resistance constant |
| Tamb | Ambient temperature |
| Tmeas | Measured temperature for rolling resistance constant |
| Fpl | Parasitic force loss |
| Kt | Thermal correction factor |
| ɑ | Tire pressure exponent |
| β | Normal force exponent |
| pi | Tire pressure |
| μs | Coefficient of static friction |
| μk | Coefficient of kinetic friction |
Longitudinal Force
The block implements the longitudinal force as a function of wheel slip relative to the road surface using these equations.
| Calculation | Equation |
|---|---|
Critical slip | |
Longitudinal force | |
Friction coefficient | |
Slip coefficient |
The equations use these variables.
| Variable | Value |
|---|---|
| κ' | Slip state |
| Fx | Longitudinal force acting on axle along tire-fixed x-axis |
| Cκ | Longitudinal stiffness |
| Fz | Vertical contact patch normal force along tire-fixed z-axis |
| μ | Friction coefficient |
| μs | Coefficient of static friction |
| μk | Coefficient of kinetic friction |
| κka | Comprehensive slip coefficient |
| α' | Slip angle state |
| λμ | Friction scaling |
Lateral Force
The block implements the lateral force as a function of wheel slip angle state using these equations.
| Calculation | Equation |
|---|---|
Critical slip angle | |
Lateral force |
The equations use these variables.
| Variable | Value |
|---|---|
| α' | Slip angle state |
| Fy | Lateral force acting on axle along tire-fixed y-axis |
| Fz | Vertical contact patch normal force along tire-fixed z-axis |
| Cɣ | Camber stiffness |
| Cα | Lateral stiffness per slip angle |
| μ | Friction coefficient |
Vertical Dynamics
The block implements these equations for the vertical dynamics.
| Calculation | Equation |
|---|---|
Vertical response | |
Tire normal force | |
Vertical sidewall deflection |
The equations use these variables.
| Variable | Value |
|---|---|
| z | Tire deflection along tire-fixed z-axis |
| zgnd | Ground displacement along tire-fixed z-axis |
| Fztire | Tire normal force along tire-fixed z-axis |
| Fz | Vertical force acting on axle along tire-fixed z-axis |
| ρz | Vertical sidewall deflection along tire-fixed z-axis |
| k | Vertical sidewall stiffness |
| b | Vertical sidewall damping |
Overturning, Aligning, and Scaling
This table summarizes the overturning, aligning, and scaling implementation.
| Calculation | Implementation |
|---|---|
Overturning moment | The Fiala model does not define an overturning moment. The block implements this equation, requiring minimal parameters. |
Aligning moment | The block implements the aligning moment as a combination of yaw rate damping and slip angle state. |
Friction scaling | To vary the coefficient of friction, use the ScaleFctr input port. |
The equations use these variables.
| Variable | Value |
|---|---|
| Mx | Overturning moment acting on axle about tire-fixed x-axis |
| Mz | Aligning moment acting on axle about tire-fixed z-axis |
| Re | Effective contact patch to wheel carrier radial distance |
| ɣ | Camber angle |
| k | Vertical sidewall stiffness |
| b | Vertical sidewall damping |
Tire angular velocity about the tire-fixed z-axis (yaw rate) | |
| w | Tire width |
| α' | Slip angle state |
| bMz | Linear yaw rate resistance |
| Fy | Lateral force acting on axle along tire-fixed y-axis |
| Cɣ | Camber stiffness |
| Cα | Lateral stiffness per slip angle |
| μ | Friction coefficient |
| Fz | Vertical contact patch normal force along tire-fixed z-axis |
Tire and Wheel Coordinate Systems
To resolve the forces and moments, the block uses the Z-Up orientation of the tire and wheel coordinate systems.
Tire coordinate system axes (XT, YT, ZT) are fixed in a reference frame attached to the tire. The origin is at the tire contact with the ground.
Wheel coordinate system axes (XW, YW, ZW) are fixed in a reference frame attached to the wheel. The origin is at the wheel center.
Z-Up Orientation1
Brakes
If you specify the Brake Type parameter as
Disc, the block implements a disc brake. This figure
shows the side and front views of a disc brake.
A disc brake converts brake cylinder pressure from the brake cylinder into force. The disc brake applies the force at the brake pad mean radius.
The block uses these equations to calculate brake torque for the disc brake.
The equations use these variables.
| Variable | Value |
|---|---|
| T | Brake torque |
| P | Applied brake pressure |
| N | Wheel speed |
| Npads | Number of brake pads in disc brake assembly |
| μstatic | Disc pad-rotor coefficient of static friction |
| μ | Disc pad-rotor coefficient of kinetic friction |
| Ba | Brake actuator bore diameter |
| Rm | Mean radius of brake pad force application on brake rotor |
| Ro | Outer radius of brake pad |
| Ri | Inner radius of brake pad |
If you specify the Brake Type parameter as
Drum, the block implements a static (steady-state)
simplex drum brake. A simplex drum brake consists of a single two-sided hydraulic
actuator and two brake shoes. The brake shoes do not share a common hinge pin.
The simplex drum brake model uses the applied force and brake geometry to calculate a net torque for each brake shoe. The drum model assumes that the actuators and shoe geometry are symmetrical for both sides, allowing a single set of geometry and friction parameters to be used for both shoes.
The block implements equations that are derived from these equations in Fundamentals of Machine Elements.
The equations use these variables.
| Variable | Value |
|---|---|
| T | Brake torque |
| P | Applied brake pressure |
| N | Wheel speed |
| μstatic | Disc pad-rotor coefficient of static friction |
| μ | Disc pad-rotor coefficient of kinetic friction |
| Trshoe | Right shoe brake torque |
| Tlshoe | Left shoe brake torque |
| a | Distance from drum center to shoe hinge pin center |
| c | Distance from shoe hinge pin center to brake actuator connection on brake shoe |
| r | Drum internal radius |
| Ba | Brake actuator bore diameter |
| Θ1 | Angle from shoe hinge pin center to start of brake pad material on shoe |
| Θ2 | Angle from shoe hinge pin center to end of brake pad material on shoe |
If you specify the Brake Type parameter as
Mapped, the block uses a lookup table to determine the
brake torque.
The equations use these variables.
| Variable | Value |
|---|---|
| T | Brake torque |
Brake torque lookup table | |
| P | Applied brake pressure |
| N | Wheel speed |
| μstatic | Friction coefficient of drum pad-face interface under static conditions |
| μ | Friction coefficient of disc pad-rotor interface |
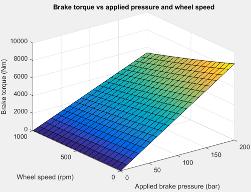
The lookup table for the brake torque, , is a function of applied brake pressure and wheel speed, where:
T is brake torque, in N·m.
P is applied brake pressure, in bar.
N is wheel speed, in rpm.
Examples
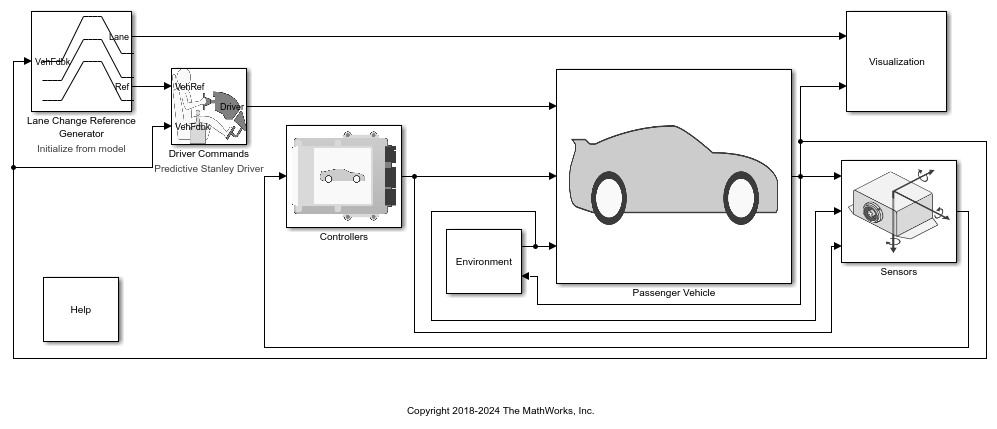
Double Lane Change Reference Application
Simulate a full vehicle dynamics model undergoing a double lane change maneuver standard ISO 3888-2. Use for vehicle dynamics ride and handling analysis and chassis controls development, including yaw stability and lateral acceleration limits.
Ports
Input
Output
Parameters
Block Options
Use the Tire type parameter to either input tire parameter values or select a fitted tire parameter set.
| Goal | Action |
|---|---|
Input user-defined tire parameter values. | Update the block parameters with user-defined parameter values:
|
Select one of the built-in Fiala tire models to drive the lateral and longitudinal calculations. | Update the applicable block parameters with values from a built-in tire model:
|
Programmatic Use
To set the block
parameter value programmatically, use the set_param
function.
To get the block
parameter value programmatically, use the get_param
function.
| Parameter: | tireType |
| Values: | External
file (default) | Light passenger car
205/60R15 | Light passenger car
245/60R16 | Mid-size passenger car
235/45R18 | Performance car
225/40R19 | SUV 265/50R20 | Light truck 275/65R18 | Commercial truck
295/75R22.5 |
| Data Types: | character vector |
Use the Brake Type parameter to select the brake.
| Action | Brake Type Setting |
|---|---|
No braking |
|
Implement brake that converts the brake cylinder pressure into a braking force |
|
Implement simplex drum brake that converts the applied force and brake geometry into a net braking torque |
|
Implement lookup table that is a function of the wheel speed and applied brake pressure |
|
Programmatic Use
To set the block parameter value
programmatically, use the set_param function.
To get the block parameter value
programmatically, use the get_param function.
| Parameter: | BrakeType |
| Values: | None | Disc | Drum | Mapped |
| Data Types: | character vector |
To calculate the rolling resistance torque, specify one of these Rolling Resistance parameters.
| Setting | Block Implementation |
|---|---|
| None |
| Method in Stepwise Coastdown Methodology for Measuring Tire Rolling Resistance. The rolling resistance is a function of tire pressure, normal force, and velocity. |
| Method specified in ISO 28580:2018, Passenger car, truck and bus tyre rolling resistance measurement method — Single point test and correlation of measurement results. |
| Magic formula equations from 4.E70 in Tire and Vehicle Dynamics. The magic formula is an empirical equation based on fitting coefficients. |
| Lookup table that is a function of the normal force and spin axis longitudinal velocity. |
Programmatic Use
To set the block parameter value programmatically, use
the set_param function.
To get the block parameter value
programmatically, use the get_param function.
| Parameter: | rollingType |
| Values: | None (default) | Pressure and velocity | ISO 28580 | Magic Formula | Mapped torque |
| Data Types: | character vector |
Dependencies
Each Rolling Resistance setting enables additional parameters.
| Setting | Parameters Enabled |
|---|---|
|
|
|
|
| Rolling resistance torque coefficient, QSY Longitudinal force rolling resistance coefficient, QSY2 Linear rotational speed rolling resistance coefficient, QSY3 Quartic rotational speed rolling resistance coefficient, QSY4 Camber squared rolling resistance torque, QSY5 Load based camber squared rolling resistance torque, QSY6 Normal load rolling resistance coefficient, QSY7 Pressure load rolling resistance coefficient, QSY8 Rolling resistance scaling factor, lam_My |
| Spin axis velocity breakpoints, VxMy Normal force breakpoints, FzMy Rolling resistance torque map, MyMap |
To calculate vertical motion, specify one of these Vertical Motion parameters.
| Setting | Block Implementation |
|---|---|
| Block passes the applied chassis forces directly through to the rolling resistance and longitudinal force calculations. |
| Vertical motion depends on wheel stiffness and damping. Stiffness is a function of tire sidewall displacement and pressure. Damping is a function of tire sidewall velocity and pressure. |
| The block uses the defined sidewall deflection directly in the effective radius calculation. |
Dependencies
Setting Vertical Motion to
Mapped stiffness and damping enables
these parameters:
| Setting | Parameters Enabled |
|---|---|
|
|
Programmatic Use
To set the block
parameter value programmatically, use the set_param
function.
To get the block
parameter value programmatically, use the get_param
function.
| Parameter: | vertType |
| Values: | None (default) | Mapped stiffness and
damping | External deflection |
| Data Types: | character vector |
Longitudinal and Lateral
Longitudinal stiffness,
Cκ, specified as a
scalar or N-by-1 vector, in N. If
you specify a scalar, the block uses that value for all wheels. If you
specify a vector, you must specify vectors for the other longitudinal
and lateral parameters.
N is the number of wheels and must match the input signal dimensions.
Programmatic Use
To set the block
parameter value programmatically, use the set_param
function.
To get the block
parameter value programmatically, use the get_param
function.
| Parameter: | Ckappa |
| Values: | 1e7 (default) | scalar | N-by-1
vector |
| Data Types: | double |
Lateral stiffness per slip angle,
Cα, specified as a
scalar or N-by-1 vector, in N/rad.
If you specify a scalar, the block uses that value for all wheels. If
you specify a vector, you must specify vectors for the other
longitudinal and lateral parameters.
N is the number of wheels and must match the input signal dimensions.
Programmatic Use
To set the block
parameter value programmatically, use the set_param
function.
To get the block
parameter value programmatically, use the get_param
function.
| Parameter: | Calpha |
| Values: | 4.5e4 (default) | scalar | N-by-1
vector |
| Data Types: | double |
Camber stiffness,
Cɣ, specified as a
scalar or N-by-1 vector, in N/rad.
If you specify a scalar, the block uses that value for all wheels. If
you specify a vector, you must specify vectors for the other
longitudinal and lateral parameters.
N is the number of wheels and must match the input signal dimensions.
Programmatic Use
To set the block
parameter value programmatically, use the set_param
function.
To get the block
parameter value programmatically, use the get_param
function.
| Parameter: | Cgamma |
| Values: | 1e3 (default) | scalar | N-by-1
vector |
| Data Types: | double |
Kinematic friction,
μk, specified as a
scalar or N-by-1 vector,
dimensionless. If you specify a scalar, the block uses that value for
all wheels. If you specify a vector, you must specify vectors for the
other longitudinal and lateral parameters.
N is the number of wheels and must match the input signal dimensions.
Programmatic Use
To set the block
parameter value programmatically, use the set_param
function.
To get the block
parameter value programmatically, use the get_param
function.
| Parameter: | muMin |
| Values: | 0.8 (default) | scalar | N-by-1
vector |
| Data Types: | double |
Static friction,
μs, specified as a
scalar or N-by-1 vector,
dimensionless. If you specify a scalar, the block uses that value for
all wheels. If you specify a vector, you must specify vectors for the
other longitudinal and lateral parameters.
N is the number of wheels and must match the input signal dimensions.
Programmatic Use
To set the block
parameter value programmatically, use the set_param
function.
To get the block
parameter value programmatically, use the get_param
function.
| Parameter: | muMax |
| Values: | 1 (default) | scalar | N-by-1
vector |
| Data Types: | double |
Longitudinal relaxation length,
Lrelx, specified as a
scalar or N-by-1 vector, in m. If
you specify a scalar, the block uses that value for all wheels. If you
specify a vector, you must specify vectors for the other longitudinal
and lateral parameters.
N is the number of wheels and must match the input signal dimensions.
Programmatic Use
To set the block
parameter value programmatically, use the set_param
function.
To get the block
parameter value programmatically, use the get_param
function.
| Parameter: | Lrelx |
| Values: | 0.05 (default) | scalar | N-by-1
vector |
| Data Types: | double |
Lateral relaxation length, Lrely, in m/rad.
Lateral relaxation length,
Lrely, specified as a
scalar or N-by-1 vector, in m/rad.
If you specify a scalar, the block uses that value for all wheels. If
you specify a vector, you must specify vectors for the other
longitudinal and lateral parameters.
N is the number of wheels and must match the input signal dimensions.
Programmatic Use
To set the block
parameter value programmatically, use the set_param
function.
To get the block
parameter value programmatically, use the get_param
function.
| Parameter: | Lrely |
| Values: | 0.15 (default) | scalar | N-by-1
vector |
| Data Types: | double |
Rolling Resistance
Pressure and Velocity
Velocity-independent force coefficient, a, dimensionless.
Programmatic Use
To set the block parameter
value programmatically, use the set_param function.
To get the block parameter
value programmatically, use the get_param function.
| Parameter: | aMy |
| Values: | 84e-4 (default) | scalar |
| Data Types: | double |
Dependencies
To enable this parameter, set Rolling Resistance to Pressure
and velocity.
Linear velocity force component, b, in s/m.
Programmatic Use
To set the block parameter
value programmatically, use the set_param function.
To get the block parameter
value programmatically, use the get_param function.
| Parameter: | bMy |
| Values: | 6.2e-4 (default) | scalar |
| Data Types: | double |
Dependencies
To enable this parameter, set Rolling Resistance to Pressure
and velocity.
Quadratic velocity force component, c, in s^2/m^2.
Programmatic Use
To set the block parameter
value programmatically, use the set_param function.
To get the block parameter
value programmatically, use the get_param function.
| Parameter: | cMy |
| Values: | 1.6e-4 (default) | scalar |
| Data Types: | double |
Dependencies
To enable this parameter, set Rolling Resistance to Pressure
and velocity.
Tire pressure exponent, ɑ, dimensionless.
Programmatic Use
To set the block parameter
value programmatically, use the set_param function.
To get the block parameter
value programmatically, use the get_param function.
| Parameter: | alphaMy |
| Values: | -0.003 (default) | scalar |
| Data Types: | double |
Dependencies
To enable this parameter, set Rolling Resistance to Pressure
and velocity.
Normal force exponent, β, dimensionless.
Programmatic Use
To set the block parameter
value programmatically, use the set_param function.
To get the block parameter
value programmatically, use the get_param function.
| Parameter: | betaMy |
| Values: | 0.97 (default) | scalar |
| Data Types: | double |
Dependencies
To enable this parameter, set Rolling Resistance to Pressure
and velocity.
ISO 28580
Parasitic force loss, Fpl, in N.
Programmatic Use
To set the block parameter value
programmatically, use the set_param function.
To get the block parameter value
programmatically, use the get_param function.
| Parameter: | Fpl |
| Values: | 10 (default) | scalar |
| Data Types: | double |
Dependencies
To enable this parameter, set Rolling Resistance to ISO
28580.
Rolling resistance constant, Cr, in N/kN. ISO 28580 specifies the rolling resistance unit as one newton of tractive resistance for every kiloNewtons of normal load.
Programmatic Use
To set the block parameter value
programmatically, use the set_param function.
To get the block parameter value
programmatically, use the get_param function.
| Parameter: | Cr |
| Values: | 1e-3 (default) | scalar |
| Data Types: | double |
Dependencies
To enable this parameter, set Rolling Resistance to ISO
28580.
Thermal correction factor, Kt, in 1/degC.
Programmatic Use
To set the block parameter value
programmatically, use the set_param function.
To get the block parameter value
programmatically, use the get_param function.
| Parameter: | Kt |
| Values: | 0.008 (default) | scalar |
| Data Types: | double |
Dependencies
To enable this parameter, set Rolling Resistance to ISO
28580.
Measured ambient temperature, Tmeas, near tire during tire testing, in K.
Programmatic Use
To set the block parameter value
programmatically, use the set_param function.
To get the block parameter value
programmatically, use the get_param function.
| Parameter: | Tmeas |
| Values: | 298.15 (default) | scalar |
| Data Types: | double |
Dependencies
To enable this parameter, set Rolling Resistance to ISO
28580.
Measured ambient temperature, Tamb, near tire in application environment, in K. For example, the measured ambient temperature is the ambient temperature near the tire when the vehicle is on the road.
Programmatic Use
To set the block parameter value
programmatically, use the set_param function.
To get the block parameter value
programmatically, use the get_param function.
| Parameter: | Tamb |
| Values: | 298.15 (default) | scalar |
| Data Types: | double |
Dependencies
To enable this parameter, set Rolling Resistance to ISO
28580.
Select to create input port Tamb to input the measured ambient temperature.
The measured ambient temperature, Tamb, is the temperature near tire in application environment, in K. For example, the measured ambient temperature is the ambient temperature near the tire when the vehicle is on the road.
Programmatic Use
To set the block parameter value
programmatically, use the set_param function.
To get the block parameter value
programmatically, use the get_param function.
| Parameter: | Tamb |
| Values: | off (default) | on |
| Data Types: | character vector |
Dependencies
To enable this parameter, set Rolling Resistance to ISO
28580.
Magic Formula
Rolling resistance torque coefficient, dimensionless.
Programmatic Use
To set the block parameter value programmatically, use
the set_param function.
To get the block parameter value
programmatically, use the get_param function.
| Parameter: | QSY1 |
| Values: | 0.007 (default) | scalar |
| Data Types: | double |
Dependencies
To enable this parameter, set Rolling Resistance to Magic
Formula.
Longitudinal force rolling resistance coefficient, dimensionless.
Programmatic Use
To set the block parameter value programmatically, use
the set_param function.
To get the block parameter value
programmatically, use the get_param function.
| Parameter: | QSY2 |
| Values: | 0 (default) | scalar |
| Data Types: | double |
Dependencies
To enable this parameter, set Rolling Resistance to Magic
Formula.
Linear rotational speed rolling resistance coefficient, dimensionless.
Programmatic Use
To set the block parameter value programmatically, use
the set_param function.
To get the block parameter value
programmatically, use the get_param function.
| Parameter: | QSY3 |
| Values: | 0.0015 (default) | scalar |
| Data Types: | double |
Dependencies
To enable this parameter, set Rolling Resistance to Magic
Formula.
Quartic rotational speed rolling resistance coefficient, dimensionless.
Programmatic Use
To set the block parameter value programmatically, use
the set_param function.
To get the block parameter value
programmatically, use the get_param function.
| Parameter: | QSY4 |
| Values: | 8.5e-05 (default) | scalar |
| Data Types: | double |
Dependencies
To enable this parameter, set Rolling Resistance to Magic
Formula.
Camber squared rolling resistance torque, in 1/rad^2.
Programmatic Use
To set the block parameter value programmatically, use
the set_param function.
To get the block parameter value
programmatically, use the get_param function.
| Parameter: | QSY5 |
| Values: | 0 (default) | scalar |
| Data Types: | double |
Dependencies
To enable this parameter, set Rolling Resistance to Magic
Formula.
Load based camber squared rolling resistance torque, in 1/rad^2.
Programmatic Use
To set the block parameter value programmatically, use
the set_param function.
To get the block parameter value
programmatically, use the get_param function.
| Parameter: | QSY6 |
| Values: | 0 (default) | scalar |
| Data Types: | double |
Dependencies
To enable this parameter, set Rolling Resistance to Magic
Formula.
Normal load rolling resistance coefficient, dimensionless.
Programmatic Use
To set the block parameter value programmatically, use
the set_param function.
To get the block parameter value
programmatically, use the get_param function.
| Parameter: | QSY8 |
| Values: | 0.9 (default) | scalar |
| Data Types: | double |
Dependencies
To enable this parameter, set Rolling Resistance to Magic
Formula.
Pressure load rolling resistance coefficient, dimensionless.
Programmatic Use
To set the block parameter value programmatically, use
the set_param function.
To get the block parameter value
programmatically, use the get_param function.
| Parameter: | QSY8 |
| Values: | -0.4 (default) | scalar |
| Data Types: | double |
Dependencies
To enable this parameter, set Rolling Resistance to Magic
Formula.
Rolling resistance scaling factor, dimensionless.
Programmatic Use
To set the block parameter value programmatically, use
the set_param function.
To get the block parameter value
programmatically, use the get_param function.
| Parameter: | lam_My |
| Values: | 1 (default) | scalar |
| Data Types: | double |
Dependencies
To enable this parameter, set Rolling Resistance to Magic
Formula.
Mapped
Spin axis velocity breakpoints, in m/s.
Programmatic Use
To set the block parameter value programmatically, use
the set_param function.
To get the block parameter value
programmatically, use the get_param function.
| Parameter: | VxMy |
| Values: | -20:1:20 (default) | vector |
| Data Types: | double |
Dependencies
To enable this parameter, set Rolling Resistance to Mapped
torque.
Normal force breakpoints, in N.
Programmatic Use
To set the block parameter value programmatically, use
the set_param function.
To get the block parameter value
programmatically, use the get_param function.
| Parameter: | FzMy |
| Values: | 0:200:1e4 (default) | vector |
| Data Types: | double |
Dependencies
To enable this parameter, set Rolling Resistance to Mapped
torque.
Rolling resistance torque versus axle speed and normal force, in N·m.
Programmatic Use
To set the block parameter value programmatically, use
the set_param function.
To get the block parameter value
programmatically, use the get_param function.
| Parameter: | MyMap |
| Values: | array |
| Data Types: | double |
Dependencies
To enable this parameter, set Rolling Resistance to Mapped
torque.
Aligning
Brake
Static friction coefficient, specified as a
scalar or N-by-1 vector, dimensionless. If
you specify a scalar, the block uses that value for all wheels. If you specify a
vector, you must specify vectors for the other brake parameters.
N is the number of wheels and must match the input signal dimensions.
Dependencies
To enable this parameter, set Brake Type to
Disc, Drum, or
Mapped.
Programmatic Use
To set the block parameter
value programmatically, use the set_param
function.
To get the block parameter
value programmatically, use the get_param function.
| Parameter: | mu_static |
| Values: | 0.3 (default) | scalar | N-by-1 vector |
| Data Types: | double |
Kinematic friction coefficient, specified as
a scalar or N-by-1 vector, dimensionless.
If you specify a scalar, the block uses that value for all wheels. If you
specify a vector, you must specify vectors for the other brake
parameters.
N is the number of wheels and must match the input signal dimensions.
Dependencies
To enable this parameter, set Brake Type to
Disc, Drum, or
Mapped.
Programmatic Use
To set the block parameter
value programmatically, use the set_param
function.
To get the block parameter
value programmatically, use the get_param function.
| Parameter: | mu_kinetic |
| Values: | 0.2 (default) | scalar | N-by-1 vector |
| Data Types: | double |
Disc
Disc brake actuator bore, specified as a
scalar or N-by-1 vector, in m. If you
specify a scalar, the block uses that value for all wheels. If you specify a
vector, you must specify vectors for the other brake parameters.
N is the number of wheels and must match the input signal dimensions.
Dependencies
To enable this parameter, set Brake Type to
Disc.
Programmatic Use
To set the block parameter
value programmatically, use the set_param
function.
To get the block parameter
value programmatically, use the get_param function.
| Parameter: | disc_abore |
| Values: | 0.05 (default) | scalar | N-by-1 vector |
| Data Types: | double |
Brake pad mean radius, specified as a scalar
or N-by-1 vector, in m. If you specify a
scalar, the block uses that value for all wheels. If you specify a vector, you
must specify vectors for the other brake parameters.
N is the number of wheels and must match the input signal dimensions.
Dependencies
To enable this parameter, set Brake Type to
Disc.
Programmatic Use
To set the block parameter
value programmatically, use the set_param
function.
To get the block parameter
value programmatically, use the get_param function.
| Parameter: | Rm |
| Values: | 0.177 (default) | scalar | N-by-1 vector |
| Data Types: | double |
Number of brake pads, specified as a scalar
or N-by-1 vector, dimensionless. If you
specify a scalar, the block uses that value for all wheels. If you specify a
vector, you must specify vectors for the other brake parameters.
N is the number of wheels and must match the input signal dimensions.
Dependencies
To enable this parameter, set Brake Type to
Disc.
Programmatic Use
To set the block parameter
value programmatically, use the set_param
function.
To get the block parameter
value programmatically, use the get_param function.
| Parameter: | num_pads |
| Values: | 2 (default) | scalar | N-by-1 vector |
| Data Types: | double |
Drum
Drum brake actuator bore, specified as a
scalar or N-by-1 vector, in m. If you
specify a scalar, the block uses that value for all wheels. If you specify a
vector, you must specify vectors for the other brake parameters.
N is the number of wheels and must match the input signal dimensions.
Dependencies
To enable this parameter, set Brake Type to
Drum.
Programmatic Use
To set the block parameter
value programmatically, use the set_param
function.
To get the block parameter
value programmatically, use the get_param function.
| Parameter: | drum_abore |
| Values: | 0.0508 (default) | scalar | N-by-1 vector |
| Data Types: | double |
Shoe pin to drum center distance, in m.
Dependencies
To enable this parameter, set Brake Type to
Drum.
Programmatic Use
To set the block parameter
value programmatically, use the set_param
function.
To get the block parameter
value programmatically, use the get_param function.
| Parameter: | drum_a |
| Values: | 0.123 (default) | scalar |
| Data Types: | double |
Shoe pin center to force application point distance, in m.
Dependencies
To enable this parameter, set Brake Type to
Drum.
Programmatic Use
To set the block parameter
value programmatically, use the set_param
function.
To get the block parameter
value programmatically, use the get_param function.
| Parameter: | drum_c |
| Values: | 0.212 (default) | scalar |
| Data Types: | double |
Drum internal radius, in m.
Dependencies
To enable this parameter, set Brake Type to
Drum.
Programmatic Use
To set the block parameter
value programmatically, use the set_param
function.
To get the block parameter
value programmatically, use the get_param function.
| Parameter: | drum_r |
| Values: | 0.15 (default) | scalar |
| Data Types: | double |
Shoe pin to pad start angle, in deg.
Dependencies
To enable this parameter, set Brake Type to
Drum.
Programmatic Use
To set the block parameter
value programmatically, use the set_param
function.
To get the block parameter
value programmatically, use the get_param function.
| Parameter: | drum_theta1 |
| Values: | 0 (default) | scalar |
| Data Types: | double |
Shoe pin to pad end angle, in deg.
Dependencies
To enable this parameter, set Brake Type to
Drum.
Programmatic Use
To set the block parameter
value programmatically, use the set_param
function.
To get the block parameter
value programmatically, use the get_param function.
| Parameter: | drum_theta2 |
| Values: | 126 (default) | scalar |
| Data Types: | double |
Mapped
Brake actuator pressure breakpoints, in bar.
Dependencies
To enable this parameter, set Brake Type to
Mapped.
Programmatic Use
To set the block parameter
value programmatically, use the set_param
function.
To get the block parameter
value programmatically, use the get_param function.
| Parameter: | brake_p_bpt |
| Values: | vector |
| Data Types: | double |
Wheel speed breakpoints, in rpm.
Dependencies
To enable this parameter, set Brake Type to
Mapped.
Programmatic Use
To set the block parameter
value programmatically, use the set_param
function.
To get the block parameter
value programmatically, use the get_param function.
| Parameter: | brake_n_bpt |
| Values: | vector |
| Data Types: | double |
The lookup table for the brake torque, , is a function of applied brake pressure and wheel speed, where:
T is brake torque, in N·m.
P is applied brake pressure, in bar.
N is wheel speed, in rpm.
Dependencies
To enable this parameter, set Brake Type to
Mapped.
Programmatic Use
To set the block parameter
value programmatically, use the set_param
function.
To get the block parameter
value programmatically, use the get_param function.
| Parameter: | f_brake_t |
| Values: | vector |
| Data Types: | double |
Wheel
Rotational damping, specified as a scalar or
N-by-1 vector, in N·m·s/rad. If you specify a
scalar, the block uses that value for all wheels. If you specify a vector, you must
specify vectors for the other rotational parameters.
N is the number of wheels and must match the input signal dimensions.
Programmatic Use
To set the block parameter value
programmatically, use the set_param function.
To get the block parameter value
programmatically, use the get_param function.
| Parameter: | br |
| Values: | scalar | N-by-1 vector |
| Data Types: | double |
Tire rotational inertia (rolling axis), specified as
a scalar or N-by-1 vector, in
kg·m2. If you specify a scalar, the block uses that value
for all wheels. If you specify a vector, you must specify vectors for the other
rotational parameters.
N is the number of wheels and must match the input signal dimensions.
Programmatic Use
To set the block parameter value
programmatically, use the set_param function.
To get the block parameter value
programmatically, use the get_param function.
| Parameter: | IYY |
| Values: | scalar | N-by-1 vector |
| Data Types: | double |
Initial wheel rotational velocity, specified as a
scalar or N-by-1 vector, in rad/s. If you specify
a scalar, the block uses that value for all wheels. If you specify a vector, you must
specify vectors for the other rotational parameters.
N is the number of wheels and must match the input signal dimensions.
Programmatic Use
To set the block parameter value
programmatically, use the set_param function.
To get the block parameter value
programmatically, use the get_param function.
| Parameter: | omegao |
| Values: | scalar | N-by-1 vector |
| Data Types: | double |
Vertical
Tire mass, specified as a scalar or
N-by-1 vector, in kg. If you
specify a scalar, the block uses that value for all wheels. If you
specify a vector, you must specify vectors for the other vertical
parameters.
N is the number of wheels and must match the input signal dimensions.
Dependencies
To enable this parameter, set Vertical Motion to Mapped
stiffness and damping.
Programmatic Use
To set the block
parameter value programmatically, use the set_param
function.
To get the block
parameter value programmatically, use the get_param
function.
| Parameter: | MASS |
| Values: | 9.46491996974568 (default) | scalar | N-by-1
vector |
| Data Types: | double |
Initial tire displacement, specified
as a scalar or N-by-1 vector, in
m. If you specify a scalar, the block uses that value for all wheels. If
you specify a vector, you must specify vectors for the other vertical
parameters.
N is the number of wheels and must match the input signal dimensions.
Dependencies
To enable this parameter, set Vertical Motion to Mapped
stiffness and damping.
Programmatic Use
To set the block
parameter value programmatically, use the set_param
function.
To get the block
parameter value programmatically, use the get_param
function.
| Parameter: | zo |
| Values: | 0 (default) | scalar | N-by-1
vector |
| Data Types: | double |
Initial wheel vertical velocity,
specified as a scalar or N-by-1
vector, in m/s. If you specify a scalar, the block uses that value for
all wheels. If you specify a vector, you must specify vectors for the
other vertical parameters.
N is the number of wheels and must match the input signal dimensions.
Dependencies
To enable this parameter, set Vertical Motion to Mapped
stiffness and damping.
Programmatic Use
To set the block
parameter value programmatically, use the set_param
function.
To get the block
parameter value programmatically, use the get_param
function.
| Parameter: | zdoto |
| Values: | 0 (default) | scalar | N-by-1
vector |
| Data Types: | double |
Gravitational acceleration, in m/s^2.
Dependencies
To enable this parameter, set Vertical Motion to Mapped
stiffness and damping.
Programmatic Use
To set the block
parameter value programmatically, use the set_param
function.
To get the block
parameter value programmatically, use the get_param
function.
| Parameter: | GRAVITY |
| Values: | -9.81 (default) | scalar |
| Data Types: | double |
Mapped Stiffness and Damping
Vector of sidewall deflection breakpoints corresponding to the force table, in m.
Dependencies
To enable this parameter, set Vertical Motion to Mapped
stiffness and damping.
Programmatic Use
To set the block
parameter value programmatically, use the set_param
function.
To get the block
parameter value programmatically, use the get_param
function.
| Parameter: | zFz |
| Values: | [0 .01 .1] (default) | vector |
| Data Types: | double |
Vector of pressure data points corresponding to the force table, in Pa.
Dependencies
To enable this parameter, set Vertical Motion to Mapped
stiffness and damping.
Programmatic Use
To set the block
parameter value programmatically, use the set_param
function.
To get the block
parameter value programmatically, use the get_param
function.
| Parameter: | pFz |
| Values: | [10000 1000000] (default) | vector |
| Data Types: | double |
Force due to sidewall deflection and pressure along wheel-fixed z-axis, in N.
Dependencies
To enable this parameter, set Vertical Motion to Mapped
stiffness and damping.
Programmatic Use
To set the block
parameter value programmatically, use the set_param
function.
To get the block
parameter value programmatically, use the get_param
function.
| Parameter: | Fzz |
| Values: | [0 1e3 1e4; 0 1e4
1e5] (default) | vector |
| Data Types: | double |
Vector of sidewall velocity breakpoints corresponding to the force due to velocity table, in m.
Dependencies
To enable this parameter, set Vertical Motion to Mapped
stiffness and damping.
Programmatic Use
To set the block
parameter value programmatically, use the set_param
function.
To get the block
parameter value programmatically, use the get_param
function.
| Parameter: | zdotFz |
| Values: | [-20 0 20] (default) | vector |
| Data Types: | double |
Force due to sidewall velocity and pressure along wheel-fixed z-axis, in N.
Dependencies
To enable this parameter, set Vertical Motion to Mapped
stiffness and damping.
Programmatic Use
To set the block
parameter value programmatically, use the set_param
function.
To get the block
parameter value programmatically, use the get_param
function.
| Parameter: | Fzzdot |
| Values: | [500 0 -500;250 0
-250] (default) | array |
| Data Types: | double |
Simulation Setup
Maximum normal force, in N. Used with all vertical force calculations.
Programmatic Use
To set the block parameter value programmatically, use
the set_param function.
To get the block parameter value
programmatically, use the get_param function.
| Parameter: | FZMAX |
| Values: | 10000 (default) | scalar |
| Data Types: | double |
Minimum normal force, in N. Used with all vertical force calculations.
Programmatic Use
To set the block parameter value programmatically, use
the set_param function.
To get the block parameter value
programmatically, use the get_param function.
| Parameter: | FZMIN |
| Values: | 0 (default) | scalar |
| Data Types: | double |
Max allowable slip ratio (absolute), KPUMAX, dimensionless.
Programmatic Use
To set the block parameter value
programmatically, use the set_param function.
To get the block parameter value
programmatically, use the get_param function.
| Parameter: | KPUMAX |
| Values: | 0.999 (default) | scalar |
| Data Types: | double |
Minimum allowable slip ratio (absolute), KPUMIN, dimensionless.
Programmatic Use
To set the block parameter value
programmatically, use the set_param function.
To get the block parameter value
programmatically, use the get_param function.
| Parameter: | KPUMIN |
| Values: | -0.999 (default) | scalar |
| Data Types: | double |
Minimum allowable slip angle (absolute), ALPMIN, in rad.
Programmatic Use
To set the block parameter value
programmatically, use the set_param function.
To get the block parameter value
programmatically, use the get_param function.
| Parameter: | ALPMIN |
| Values: | -1.5708 (default) | scalar |
| Data Types: | double |
Minimum ambient temperature, TMIN, in K.
Programmatic Use
To set the block parameter value programmatically, use
the set_param function.
To get the block parameter value
programmatically, use the get_param function.
| Parameter: | TMIN |
| Values: | 0 (default) | scalar |
| Data Types: | double |
Dependencies
To enable this parameter, set Rolling Resistance to ISO
28580.
Maximum ambient temperature, TMAX, in K.
Programmatic Use
To set the block parameter value programmatically, use
the set_param function.
To get the block parameter value
programmatically, use the get_param function.
| Parameter: | TMAX |
| Values: | 400 (default) | scalar |
| Data Types: | double |
Dependencies
To enable this parameter, set Rolling Resistance to
ISO 28580.
Plotting
Click Install Extended Tire Features to install the Extended Tire Features for Vehicle Dynamics Blockset support package. With the support package, you can plot steady-state force and moment tire responses from the Fiala Wheel 2DOF Block Parameters dialog box.
Click Plot steady state force, moment response to generate these plots:
Lateral force [N] vs Slip angle [rad]
Self-aligning moment [Nm] vs Slip angle [rad]
Longitudinal force [N] vs Longitudinal slip []
Longitudinal force [N] vs Lateral force [N]
Dependencies
To enable this parameter, click Install Extended Tire Features.
References
[1] Fiala, E. "Seitenkrafte am Rollenden Luftreifen." VDI Zeitschrift, V.D.I.. Vol 96, 1954.
[2] Highway Tire Committee. Stepwise Coastdown Methodology for Measuring Tire Rolling Resistance. Standard J2452_199906. Warrendale, PA: SAE International, June 1999.
[3] ISO 28580:2018. Passenger car, truck and bus tyre rolling resistance measurement method — Single point test and correlation of measurement results. ISO (International Organization for Standardization), 2018.
[4] Pacejka, H. B. Tire and Vehicle Dynamics. 3rd ed. Oxford, UK: SAE and Butterworth-Heinemann, 2012.
Extended Capabilities
Version History
Introduced in R2019aSee Also
Blocks
- Combined Slip Wheel STI | Combined Slip Wheel 2DOF | Combined Slip Wheel CPI | Longitudinal Wheel | Dugoff Wheel 2DOF
Functions
1 Reprinted with permission Copyright © 2008 SAE International. Further distribution of this material is not permitted without prior permission from SAE.