isDone
Syntax
Description
Examples
Perform RGB-D visual simultaneous localization and mapping (vSLAM) using the data from the TUM RGB-D Benchmark. You can download the data to a temporary directory using a web browser or by running this code:
baseDownloadURL = "https://vision.in.tum.de/rgbd/dataset/freiburg3/rgbd_dataset_freiburg3_long_office_household.tgz"; dataFolder = fullfile(tempdir,"tum_rgbd_dataset",filesep); options = weboptions(Timeout=Inf); tgzFileName = dataFolder+"fr3_office.tgz"; folderExists = exist(dataFolder,"dir"); % Create a folder in a temporary directory to save the downloaded file if ~folderExists mkdir(dataFolder) disp("Downloading fr3_office.tgz (1.38 GB). This download can take a few minutes.") websave(tgzFileName,baseDownloadURL,options); % Extract contents of the downloaded file disp("Extracting fr3_office.tgz (1.38 GB) ...") untar(tgzFileName,dataFolder); end
Create two imageDatastore objects. One to store the color images and the other to store the depth images.
colorImageFolder = dataFolder+"rgbd_dataset_freiburg3_long_office_household/rgb/"; depthImageFolder = dataFolder+"rgbd_dataset_freiburg3_long_office_household/depth/"; imdsColor = imageDatastore(colorImageFolder); imdsDepth = imageDatastore(depthImageFolder);
Select the synchronized pair of color and depth images.
data = load("rgbDepthPairs.mat");
imdsColor=subset(imdsColor, data.indexPairs(:, 1));
imdsDepth=subset(imdsDepth, data.indexPairs(:, 2));Specify your camera intrinsic parameters, and use them to create an RGB-D visual SLAM object.
intrinsics = cameraIntrinsics([535.4 539.2],[320.1 247.6],[480 640]); depthScaleFactor = 5000; vslam = rgbdvslam(intrinsics,depthScaleFactor);
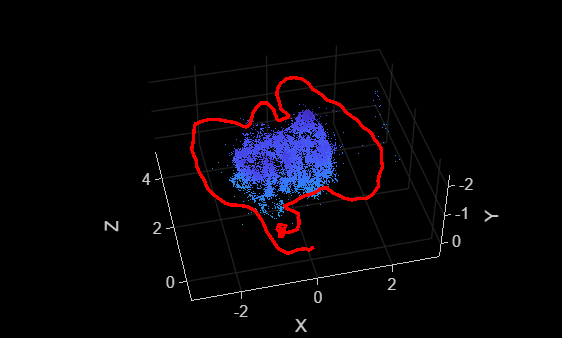
Process each pair of color and depth images, and visualize the camera poses and 3-D map points.
for i = 1:numel(imdsColor.Files) colorImage = readimage(imdsColor,i); depthImage = readimage(imdsDepth,i); addFrame(vslam,colorImage,depthImage); if hasNewKeyFrame(vslam) % Query 3-D map points and camera poses xyzPoints = mapPoints(vslam); [camPoses,viewIds] = poses(vslam); % Display 3-D map points and camera trajectory plot(vslam); end % Get current status of system status = checkStatus(vslam); % Stop adding frames when tracking is lost if status == uint8(0) break end end
Once all the frames have been processed, reset the system.
while ~isDone(vslam) plot(vslam); end
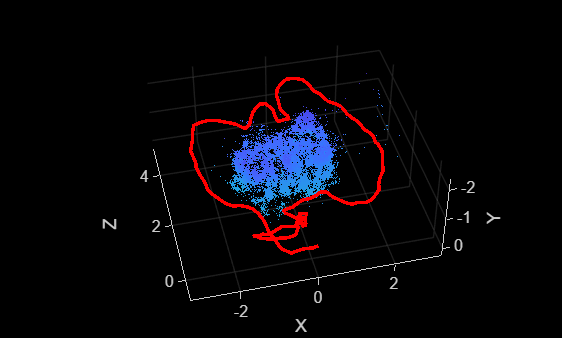
reset(vslam);
Perform RGB-D visual-inertial SLAM using the data from the OpenLORIS-Scene Dataset. Download the data to a temporary directory using a web browser or by running this code:
dataFolder = fullfile(tempdir,"OpenLORIS-Scene",filesep); downloadURL = "https://ssd.mathworks.com/supportfiles/shared_nav_vision/data/OpenLORIS-Scene_corridor1-4.zip"; zipFileName = dataFolder+"corridor1-4.zip"; if ~isfolder(dataFolder) mkdir(dataFolder); disp("Downloading corridor1-4.zip (1.13 GB). This download can take a few minutes."); options = weboptions('Timeout', Inf); websave(zipFileName, downloadURL, options); unzip(zipFileName, dataFolder); end
Create two imageDatastore objects. One to store the color images and the other to store the depth images.
imageFolder = fullfile(dataFolder,"OpenLORIS-Scene_corridor1-4"); imdsColor = imageDatastore(fullfile(imageFolder,"color")); imdsDepth = imageDatastore(fullfile(imageFolder,"aligned_depth"));
Load the IMU measurements data and the camera-to-IMU transform.
data = load("corridor4_IMU_data.mat");
gyro = data.gyroDataCell;
accel = data.accelDataCell;
cam2IMU = data.cam2IMU;Specify the camera intrinsics, the IMU parameters, and use them to create an RGB-D visual-inertial SLAM object.
% Camera intrinsic and IMU parameters can be found in the downloaded % sensors.yaml file intrinsics = cameraIntrinsics([6.1145098876953125e+02, 6.1148571777343750e+02],... [4.3320397949218750e+02, 2.4947302246093750e+02], [480, 848]); imuParams = factorIMUParameters(AccelerometerBiasNoise=2.499999936844688e-05*eye(3),... AccelerometerNoise=0.00026780980988405645*eye(3),... GyroscopeNoise=1.0296060281689279e-05*eye(3),... GyroscopeBiasNoise=2.499999993688107e-07*eye(3),... SampleRate=250); depthScaleFactor = 1000; vslam = rgbdvslam(intrinsics, depthScaleFactor, imuParams, SkipMaxFrames=10,... CameraToIMUTransform=cam2IMU, TrackFeatureRange = [30, 150], DepthRange= [0.1, 6.5], ... NumPosesThreshold=20, MaxNumPoints=1.2e3);
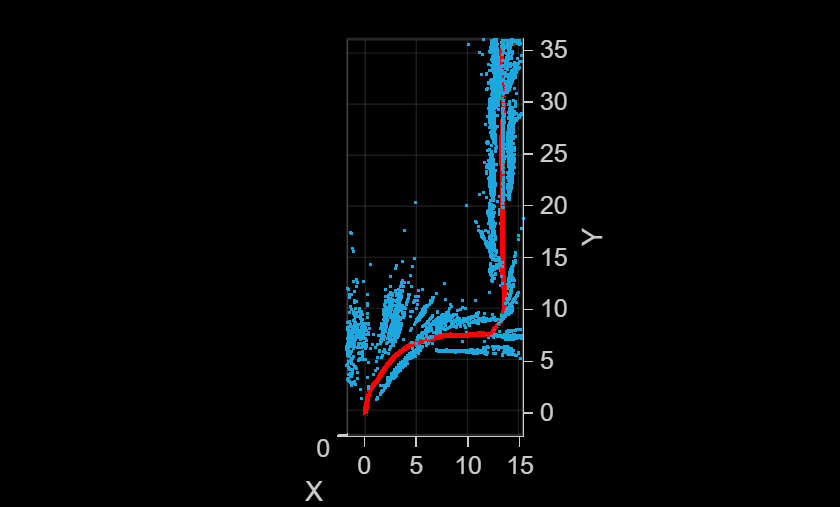
Process image data and IMU data, and visualize the camera poses and 3-D map points. The abrupt changes observed in the camera poses demonstrate that the camera trajectories have been successfully aligned with the IMU predictions, which is an essential step in visual-inertial SLAM. This process transforms the camera poses into the IMU's coordinate system.
for i = 1:numel(imdsColor.Files) colorImage = readimage(imdsColor,i); depthImage = readimage(imdsDepth,i); addFrame(vslam, colorImage, depthImage, gyro{i}, accel{i}); if hasNewKeyFrame(vslam) plot(vslam); end end
Once all the frames have been processed, reset the system.
while ~isDone(vslam) if hasNewKeyFrame(vslam) ax = plot(vslam); end end view(ax, 0, 90)
reset(vslam);
Input Arguments
Version History
Introduced in R2024a