Diseño de controladores PID para el seguimiento rápido de referencia
Este ejemplo muestra cómo usar PID Tuner para diseñar un controlador para la planta:
Los requisitos de diseño buscan que el sistema de lazo cerrado realice el seguimiento de una entrada de referencia con un tiempo de subida inferior a 1,5 s y un tiempo de establecimiento inferior a 6 s.
En este ejemplo, se representa la planta como un modelo LTI. Para obtener más información sobre cómo usar PID Tuner para ajustar un bloque PID Controller en un modelo de Simulink®, consulte Tune PID Controller to Favor Reference Tracking or Disturbance Rejection (Simulink Control Design).
Cree el modelo de planta y abra PID Tuner para diseñar un controlador PI como diseño inicial.
sys = zpk([],[-1 -1 -1],1); pidTuner(sys,'pi')
Cuando abre PID Tuner, este diseña automáticamente un controlador del tipo que especifique (en este caso, PI). El controlador está diseñado para que haya un equilibrio entre el rendimiento (tiempo de respuesta) y la robustez (márgenes de estabilidad). PID Tuner muestra la respuesta al escalón de lazo cerrado del sistema con el controlador diseñado.
Sugerencia
También puede abrir PID Tuner desde MATLAB® desktop, en la pestaña Apps. Después, use el menú Plant de PID Tuner para especificar el modelo de planta.
Examine los tiempos de subida y de establecimiento del seguimiento de referencia.
Haga clic con el botón secundario en la gráfica y seleccione
Characteristics > Rise Timepara marcar el tiempo de subida con un punto azul en la gráfica. SeleccioneCharacteristics > Settling Timepara marcar el tiempo de establecimiento. Para ver sugerencias con valores numéricos, haga clic en cada uno de los puntos azules.
El diseño inicial de controlador PI proporciona un tiempo de subida de 2,35 s y un tiempo de establecimiento de 10,7 s. Ambos resultados son más lentos que los requisitos de diseño.
Nota
Para mostrar las métricas de rendimiento en una tabla en lugar de a modo de sugerencias en la gráfica, haga clic en Show parameters. Esta acción abre una pantalla con métricas de rendimiento y robustez, y las ganancias ajustadas del controlador.
Desplace el control deslizante Response time a la derecha para tratar de mejorar el rendimiento del lazo. La gráfica de respuesta se actualiza automáticamente con el nuevo diseño.

Si aleja el control deslizante Response time lo suficiente como para cumplir el requisito de tiempo de subida inferior a 1,5 s se producirá más oscilación. Además, la pantalla de parámetros muestra que la nueva respuesta tiene un tiempo de establecimiento inaceptablemente largo.

Para lograr una mayor velocidad de respuesta, el algoritmo debe sacrificar la estabilidad.
Cambie el tipo de controlador para mejorar la respuesta.
Si se añade una acción derivada al controlador, PID Tuner tiene más libertad para alcanzar un margen de fase adecuado con la velocidad de respuesta deseada.
En el menú Type, seleccione
PIDF. PID Tuner diseña un nuevo controlador PIDF. (Para obtener más información sobre los tipos de controlador disponibles, consulte Tipo de controlador PID).
Ahora el tiempo de subida y el tiempo de establecimiento cumplen los requisitos de diseño. Puede usar el control deslizante Response time para hacer más ajustes en la respuesta. Para volver al resultado de ajuste automatizado predeterminado, haga clic en Reset Design.
Nota
Para ajustar el ancho de banda de lazo cerrado en lugar del tiempo de respuesta, seleccione
Frequencyde la lista desplegable Domain. El ancho de banda es inversamente proporcional al tiempo de respuesta.Analice otras respuestas del sistema, si corresponde.
Para analizar otras respuestas del sistema, haga clic en Add Plot. Seleccione la respuesta del sistema que desea analizar.
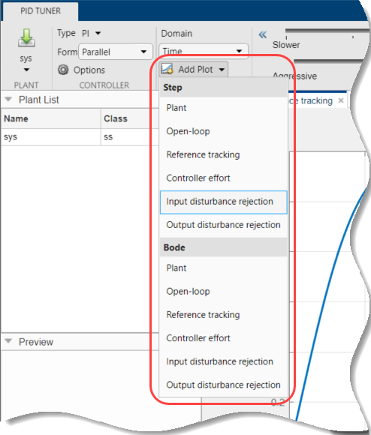
Por ejemplo, para observar la respuesta al escalón de lazo cerrado a la perturbación en la entrada de la planta, en la sección Step del menú Add Plot, seleccione
Input disturbance rejection. La respuesta de anulación de perturbaciones aparece en una nueva figura.
Para obtener más información sobre las gráficas de respuesta disponibles, consulte Analyze Design in PID Tuner.
Sugerencia
Use las opciones de la pestaña View para cambiar cómo PID Tuner muestra múltiples gráficas.
Exporte el diseño del controlador al área de trabajo de MATLAB.
Para exportar el diseño final del controlador al área de trabajo de MATLAB, haga clic en
 Export. PID Tuner exporta el controlador como un
Export. PID Tuner exporta el controlador como un Como alternativa, puede exportar un modelo usando el menú contextual en Data Browser. Para ello, haga clic en la pestaña Data Browser.

Después, haga clic con el botón secundario en el modelo y seleccione Export.
