loopview
Graphically analyze MIMO feedback loops
Description
loopview(
plots characteristics of the positive-feedback, multi-input,
multi-output (MIMO) feedback loop with plant G,C)G
and controller C.

Use loopview to analyze the performance of a
tuned control system you obtain using looptune.
Note
If you are tuning a Simulink® model with
looptune through an
slTuner interface, analyze
the performance of your control system using
loopview (Simulink Control Design) for
slTuner (requires Simulink
Control Design™).
loopview plots the singular values of:
Open-loop frequency responses
G*CandC*GSensitivity function
S = inv(1-G*C)and complementary sensitivityT = 1-SMaximum (target), actual (tuned), and normalized MIMO stability margins.
loopviewplots the multi-loop disk margin (see Stability Analysis Using Disk Margins (Robust Control Toolbox)). Use this plot to verify that the stability margins of the tuned system do not significantly exceed the target value.
For more information about singular values, see sigma.
loopview(
uses the G,C,info)info structure returned by looptune. This
syntax also plots the target and tuned values of tuning constraints
imposed on the system. Additional plots include:
Singular values of the maximum allowed
SandT. The curve markedS/T Maxshows the maximum allowedSon the low-frequency side of the plot, and the maximum allowedTon the high-frequency side. These curves are the constraints thatlooptuneimposes onSandTto enforce the target crossover rangewc.Target and tuned values of constraints imposed by any tuning goal requirements you used with
looptune.
Use loopview with the info
structure to assist in troubleshooting when tuning fails to meet all
requirements.
Examples
Tune a control system with looptune and use loopview to examine the performance of the tuned controller.
Create and tune control system.
s = tf('s'); G = 1/(75*s+1)*[87.8 -86.4; 108.2 -109.6]; G.InputName = {'qL','qV'}; G.OutputName = 'y'; D = tunableGain('Decoupler',eye(2)); PI_L = tunablePID('PI_L','pi'); PI_L.OutputName = 'qL'; PI_V = tunablePID('PI_V','pi'); PI_V.OutputName = 'qV'; sum = sumblk('e = r - y',2); C0 = (blkdiag(PI_L,PI_V)*D)*sum; wc = [0.1,1]; options = looptuneOptions('RandomStart',5); [G,C,gam,info] = looptune(-G,C0,wc,options);
Final: Peak gain = 0.956, Iterations = 28 Achieved target gain value TargetGain=1.
Examine the controller performance.
figure('Position',[100,100,520,1000])
loopview(G,C,info)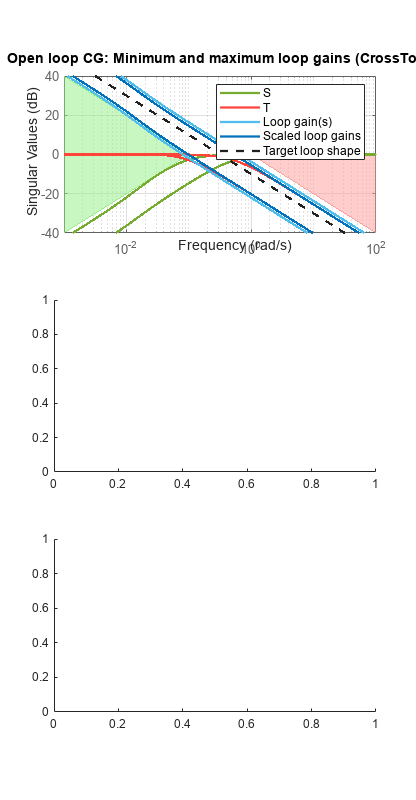
The first plot shows that the open-loop gain crossovers fall close to the specified interval [0.1,1]. This plot also includes the tuned values of the sensitivity function S = inv(1-G*C) and complementary sensitivity T = 1-S. These curves reflect the constraints that looptune imposes on S and T to enforce the target crossover range wc.
The second and third plots show that the MIMO stability margins of the tuned system fall well within the target range.
Input Arguments
Alternatives
For analyzing Simulink models tuned with looptune through an
slTuner (Simulink Control Design) interface,
use loopview (Simulink Control Design) for
slTuner (requires Simulink
Control Design).
Version History
Introduced in R2011bSee Also
looptune | slTuner (Simulink Control Design) | looptune (for
slTuner) (Simulink Control Design) | loopview (for
slTuner) (Simulink Control Design)