getrom
Obtain reduced-order models when using frequency-response fitting method
Since R2025a
Description
Examples
This example shows how to reduce model order of a sparss model using the frequency response fitting method. The sparse state-space model used in this example is obtained from linearizing a thermal model of heat distribution in a circular cylindrical rod.
Load the model data.
load cylindricalRod.mat
sys = sparss(A,B,C,D,E);
size(sys)Sparse state-space model with 3 outputs, 1 inputs, and 7522 states.
The thermal model contains 7522 states.
To reduce the model order, first create a frequency response fitting specification object for sys.
R = reducespec(sys,'frfit');To customize the specification object, you can specify additional options such as a frequency grid and the feedthrough values. Since the feedthrough values for the original model is zero, you can set it to zero in the options.
w = logspace(-7,-3,20);
R.Options.Frequency = w;
R.Options.Feedthrough = zeros(3,1);
R.Options.RelTol = 1e-3;
R.Options.Display = 'off';Run the model reduction algorithm and visualize the frequency response of the original model and the fit error.
R = process(R); view(R)
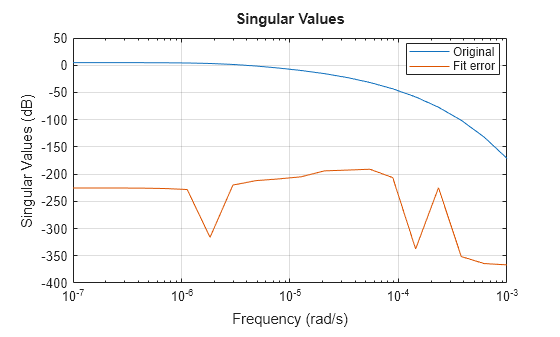
Obtain the reduced model from the rational fit. You can specify additional arguments of getrom such that the software returns a model in descriptor form and does not enforce any stability on the fitted model.
rsys = getrom(R,Explicit=false,Stable=false); order(rsys)
ans = 11
Compare the relative error between two models.
sigmaplot(sys,sys-rsys,"r--",w)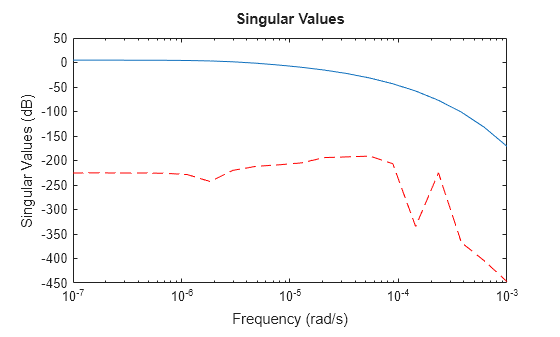
The reduced model provides a good approximation of the original sparse model.
This example shows how to fit a low-order model using the frequency response fitting method. In this example, you obtain a reduced-order model of a tuning fork model. The model is a sparse second-order (mechss) model with two outputs, one input, and 3024 degrees of freedom.
Load the model.
load tuningForkData.mat
sys = mechss(M,[],K,B,F);
w = logspace(2,6,250);
size(sys)Sparse second-order model with 2 outputs, 1 inputs, and 3024 degrees of freedom.
Create a model order reduction object for frequency response fitting using reducespec. Specify a frequency grid and the feedthrough value for interpolation.
R = reducespec(sys,'frfit'); R.Options.Frequency = w; R.Options.Feedthrough = [0;0]; R.Options.Display = "off"; R = process(R);
rsys1 = getrom(R,Explicit=false,Stable=true,Minimal=true); o1 = order(rsys1)
o1 = 90
sigmaplot(sys,rsys1,"--",w)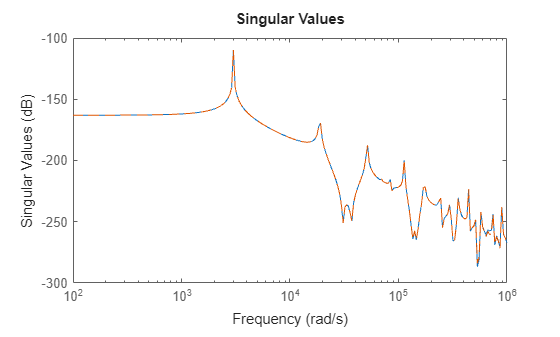
This returns a model with an order which is still quite high. You can further reduce the model order by focusing on just the lower frequencies. Increasing AbsTol allows for a larger error at higher frequencies where the gain is low but the mode density increases.
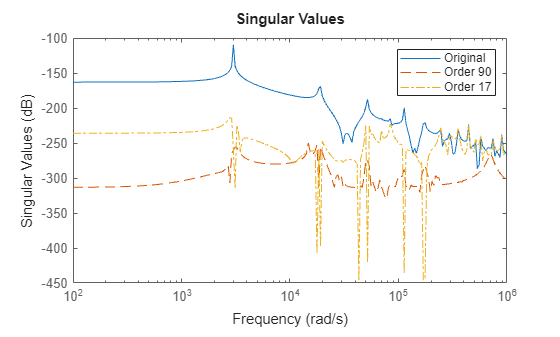
R.Options.AbsTol = 1e-11; R.Options.RelTol = 1e-3; rsys2 = getrom(R,Explicit=false,Stable=true,Minimal=true); o2 = order(rsys2)
o2 = 17
The algorithm now produces a reduced model with much lower order. Compare the relative error between the original and reduced models.
sigmaplot(sys,sys-rsys1,"--",sys-rsys2,"-.",w) legend("Original",sprintf("Order %d",o1),... sprintf("Order %d",o2));
This example shows how to reduce a model order of a multi-input multi-output (MIMO) model using the frequency response fitting method. Typically, when you reduce MIMO models using this method, the default reduced model may not have a minimal order. This example shows how to ensure the fit is minimal.
For this example, generate a random state-space model with 50 states, two outputs, and three inputs.
rng(0); sys = rss(50,2,3);
When using the frequency response fitting method, the software requires you to specify a grid of frequencies for evaluating the frequency response. To select a suitable grid, analyze the frequency response of the model.
sigmaplot(sys)
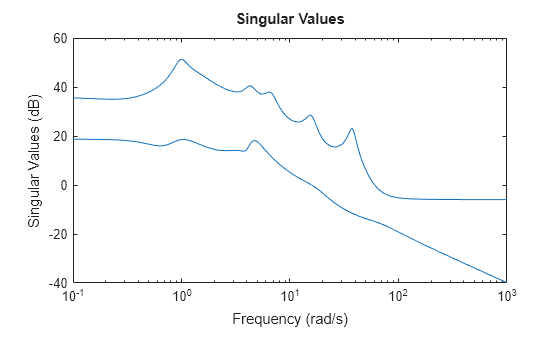
For this model, you can specify frequencies between 0.1 rad/s and 1000 rad/s.
w = logspace(-1,3,100);
Create a model reduction object.
R = reducespec(sys,"frfit");Specify the desired frequency grid and run the model reduction algorithm.
R.Options.Frequency = w; R = process(R);
Obtain the reduced model from the rational fit.
rsys = getrom(R); order(rsys)
ans = 30
This produces a 30th order model. By default, getrom returns a stable and explicit realization of the reduced model. However, when you use this method with MIMO models, the software may produce a nonminimal order fit. To ensure a minimal order fit, you can set the Minimal argument of getrom to true. This performs an additional balanced truncation on the initially reduced model. The software further reduces this model as long as it maintains the desired fit accuracy.
Obtain the model.
rsys2 = getrom(R,Minimal=true); order(rsys2)
ans = 26
Now getrom produces a model with order 26. Compare the relative error between the original and reduced models.
sigmaplot(sys,sys-rsys,":",sys-rsys2,"--") legend("sys","sys-rsys","sys-rsys2")
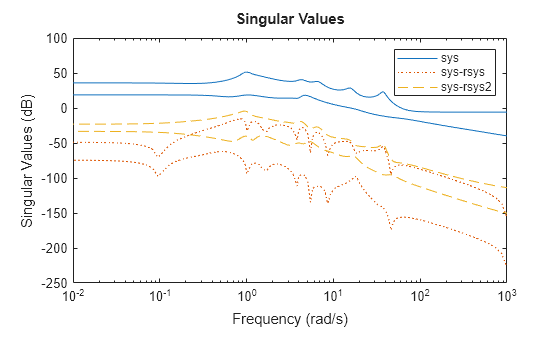
The fitted models provide an accurate match for the original model.
This example shows how to enforce stability in reduced models obtained using frequency response fitting method and the effects of refining the frequency grid to avoid unstable modes.
Generate a random state-space model.
rng(1) sys = rss(50); bodeplot(sys)
First, reduce the model using a frequency grid of 30 points between 0.01 rad/s and 100 rad/s.
w = logspace(-2,2,30);
R = reducespec(sys,'frfit');
R.Options.Frequency = w;When you use getrom with the Stable argument set to false, the software runs the standard AAA algorithm which does not enforce stability of the fitted model.
rsys1 = getrom(R,Stable=false);
The low relative error shows that the reduced model is a good fit on the specified grid.
sigma(sys,sys-rsys1,w)
legend("sys","sys-rsys1",Location="best")
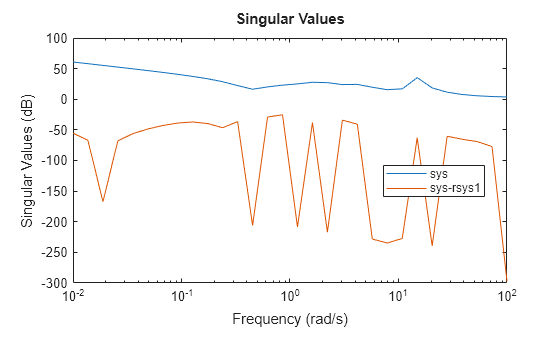
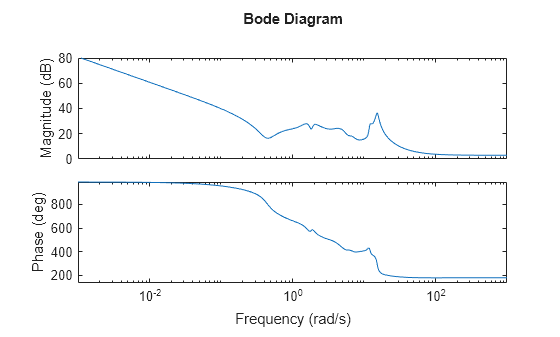
However, outside the grid points, the reduced model does not provide a good fit.
bode(sys,rsys1) legend
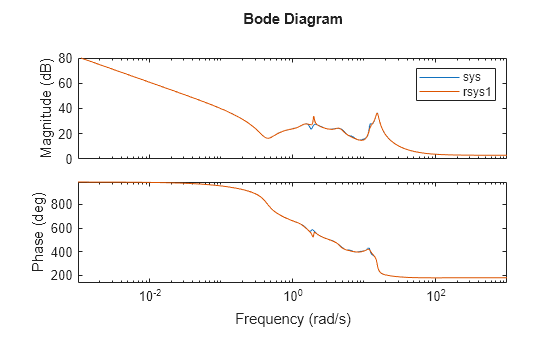
Additionally, this fit is also unstable.
max(real(pole(rsys1)))
ans = 0.0335
However, when Stable is set to true, the software enforces stability after the AAA algorithm has run.
rsys2 = getrom(R,Stable=true); max(real(pole(rsys2)))
ans = -2.9364e-08
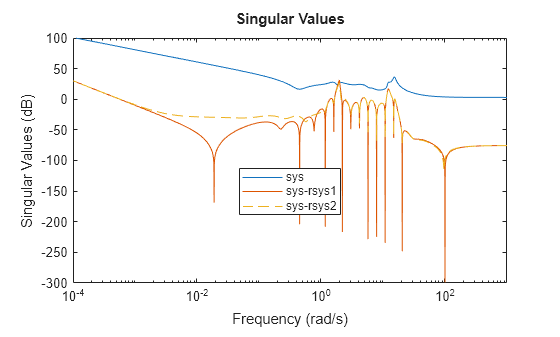
In this case, the stabilization works well with only a minor degradation in fit quality. This is not always the case however, post-AAA stabilization may introduce significant errors past the frequency of the first stabilized mode.
sigma(sys,sys-rsys1,sys-rsys2,"--") legend("sys","sys-rsys1","sys-rsys2",Location="best")
In principle, stability is encoded in the frequency response. In general, unstable poles creep in where the frequency grid is too sparse to accurately capture the system dynamics. Refining the grid is often an effective, error-free way to restore stability.
w = logspace(-2,2,60);
R = reducespec(sys,'frfit');
R.Options.Frequency = w;
rsys3 = getrom(R,Stable=false);
max(real(pole(rsys3)))ans = 3.3737e-08
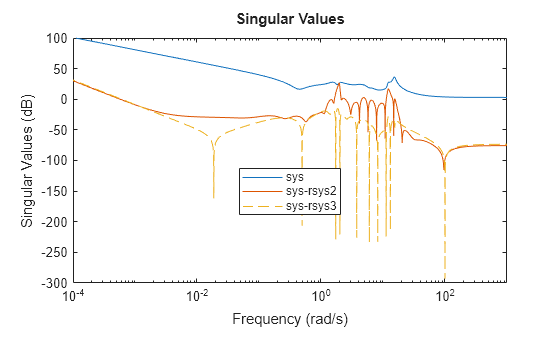
This last fit rsys3 is stable and more accurate than the stabilized fit rsys2.
sigma(sys,sys-rsys2,sys-rsys3,"--") legend("sys","sys-rsys2","sys-rsys3",Location="best")
There is a small increase in order for the refined grid as there is more data to fit.
[order(rsys2) order(rsys3)]
ans = 1×2
17 19
Therefore, when a stable model is required and getrom returns an unstable fit, you can either enforce stability with Stable=true, or refine the grid.
Input Arguments
Name-Value Arguments
Output Arguments
Version History
Introduced in R2025a