openloopeditor
Description
ole =
openloopeditor(Plant= creates an open-loop
editor for tuning a compensator for plant plant)plant and returns a
corresponding OpenLoopEditor object. In this case, the editor opens in a
new figure using a Bode editor view.
If you do not specify the plant when you create the editor, you must define the plant before tuning by setting the
Plantproperty ofole.To obtain the tuned compensator, use the
Compensatorproperty ofole.
For more information on designing a compensator using a standalone open-loop editor, see Design Compensator Using Open-Loop Editor.
ole = openloopeditor(parent)UIGridLayout, and sets the Parent property. Use
this syntax when you want to create an editor in a specified open figure or when creating
apps in App Designer.
For an app-creation example, see Create Open-Loop Control Design App.
ole = openloopeditor(___,Name=Value)openloopeditor(Plant=sys,ViewType="rlocus") specifies the plant as
dynamic system model sys and configures the editor view as a root locus
editor.
Examples
Create a standalone open-loop editor to tune a compensator for a specified plant.
Specify a SISO plant for tuning. For this example, use a random third-order state-space system.
G = rss(3);
Create an open-loop editor for this plant.
ole = openloopeditor(Plant=G);
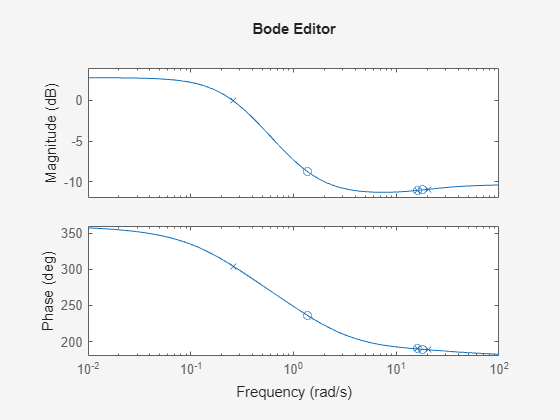
A default Bode editor opens in a new figure. To change the appearance of the Bode
editor, for example to add grid lines or change axis limits, you can modify the returned
ole object.
Interactively tune the controller using the open-loop editor. For an example, see Design Compensator Using Open-Loop Editor.
After tuning, obtain the final compensator from the Compensator
property of ole.
C = ole.Compensator;
During tuning, you can plot the closed-loop step response of the combined compensator and plant.
CL = feedback(ole.Plant*ole.Compensator,1); stepplot(CL)
Create a standalone open-loop editor to tune a compensator for a specified plant using a root locus editor view.
Specify a SISO plant for tuning. For this example, use a random third-order state-space system.
G = rss(3);
Create a root locus editor for this plant.
ole = openloopeditor(Plant=G,ViewType="rlocus");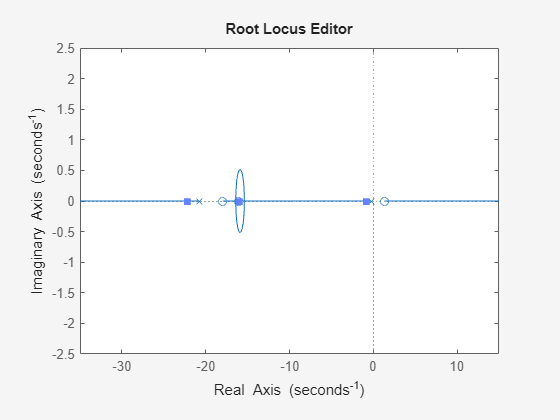
A root locus editor opens in a new figure.
Interactively tune the controller using the open-loop editor. For an example, see Design Compensator Using Open-Loop Editor.
After tuning, obtain the final compensator from the Compensator
property of ole.
C = ole.Compensator;
You can create linear analysis plots that automatically update when you modify a compensator using an open-loop editor. This example creates a Bode editor and a step plot in separate figures and updates the step plot when the compensator changes.
Create SISO plant.
plant = rss(3);
Create open-loop editor.
ole = openloopeditor(Plant=plant);
Create step plot in a separate figure and plot the initial closed-loop response with a unit-gain compensator.
sp = stepplot(feedback(plant,1));
Define a callback function that updates the step plot when the compensator value
changes. Here, src is the event source (open-loop editor) and
data is an event data structure that contains the updated
compensator..
function updateStepPlot(src,data,sp) sp.Responses(1).SourceData.Model = ... feedback(src.Plant*data.Compensator,1); end
Set the callback function in the open-loop editor to the
updateStepPlot function and pass the step-plot object as an
additional input argument.
ole.CompensatorChangedFcn = @(src,data) updateStepPlot(src,data,sp);
When you modify the compensator using the open-loop editor, the step plot updates to show the new closed-loop response.
This example creates a root locus editor and a step plot in a single figure and updates the step plot when the compensator changes.
Create SISO plant.
plant = rss(3);
Create a figure that contains a grid layout with one row and two columns. Increase the height and width of the figure by 40%.
f = uifigure(Name="Open-Loop Editor");
f.Position(3) = f.Position(3)*1.4;
f.Position(4) = f.Position(4)*1.4;
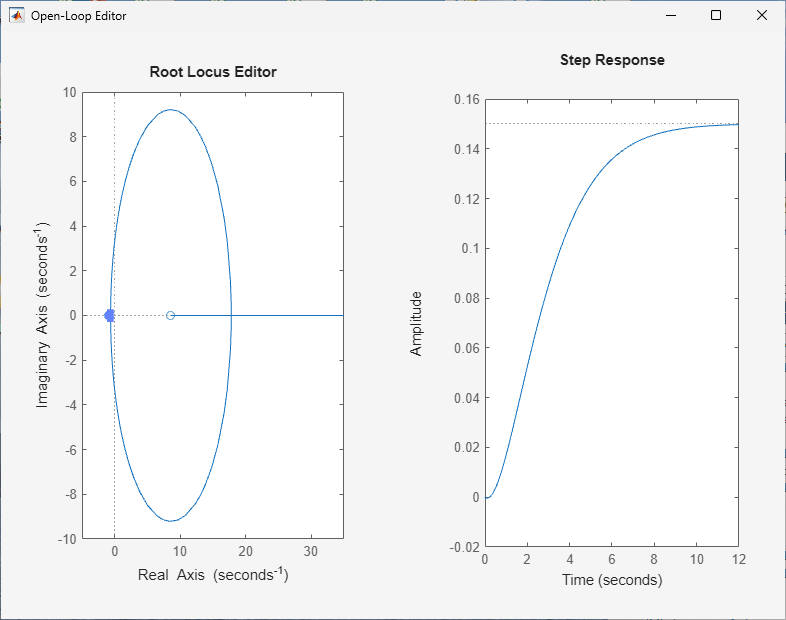
gl = uigridlayout(f,[1 2]);Create an open-loop editor and add it to the grid layout.
ole = openloopeditor(gl,Plant=plant,ViewType="rlocus");Create a step plot of the initial closed-loop response and add it to the grid layout.
sp = stepplot(gl,feedback(plant,1));
Define a callback function that updates the step plot when the compensator value
changes. Here, src is the event source (open-loop editor) and
data is an event data structure.
function updateStepPlot(src,data,sp) sp.Responses(1).SourceData.Model = ... feedback(src.Plant*data.Compensator,1); end
Set the callback function in the open-loop editor using a handle to the
updateStepPlot function.
ole.CompensatorChangedFcn = @(src,data) updateStepPlot(src,data,sp);
When you modify the compensator using the open-loop editor, the step plot updates to show the new closed-loop response.
Input Arguments
Name-Value Arguments
Output Arguments
Version History
Introduced in R2025a