Modelado de sistemas de control con objetos de modelo
Los objetos de modelo pueden representar componentes individuales de una arquitectura de control, tales como la planta, actuadores, sensores o controladores. Puede conectar los objetos de modelo para generar modelos agregativos de diagramas de bloques que representen la respuesta combinada de múltiples elementos.
Por ejemplo, el siguiente sistema de control contiene un prefiltro F, una planta G y un controlador C, organizados en una configuración de lazo simple. El modelo también incluye una representación de la dinámica de los sensores, S.
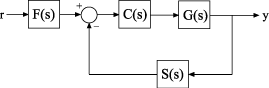
Puede representar cada uno de los componentes como un objeto de modelo. No tiene que utilizar el mismo tipo de objeto de modelo para cada componente. Por ejemplo, represente la planta G como un modelo de cero-polo-ganancia (zpk) con dos polos en s = -1; C como controlador PID y F y S como funciones de transferencia:
G = zpk([],[-1,-1],1); C = pid(2,1.3,0.3,0.5); S = tf(5,[1 4]); F = tf(1,[1 1]);
A continuación, puede combinar estos elementos para generar modelos que representen su sistema de control o el sistema de control como un todo. Por ejemplo, cree la respuesta de lazo abierto SGC:
open_loop = S*G*C;
Para generar un modelo de la respuesta en lazo cerrado sin filtrar, utilice el comando feedback:
T = feedback(G*C,S);
Para modelar la respuesta de todo el sistema de lazo cerrado desde r hasta y, combine T con la función de transferencia de filtro:
Try = T*F;
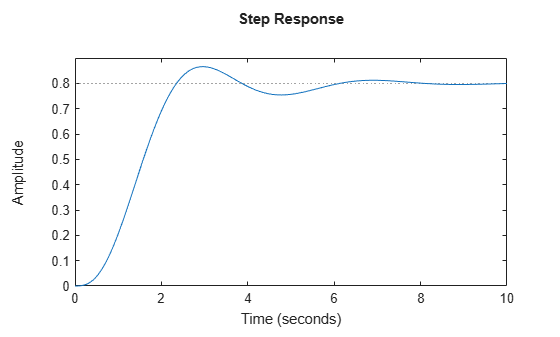
Los resultados open_loop, T y Try también son objetos de modelo lineales. Puede operar en ellos con los comandos de análisis y el diseño de control de Control System Toolbox™. Por ejemplo, represente gráficamente la respuesta al escalón de todo el sistema:
stepplot(Try)
Al combinar modelos LTI numéricos, el modelo LTI numérico resultante representa el sistema agregativo. El modelo resultante no conserva los datos originales de los componentes combinados. Por ejemplo, T no supervisa por separado la dinámica de los componentes G, C y S que se combinan para crear T.