Ubicación de polos y ceros
Este ejemplo muestra cómo examinar la ubicación de polos y ceros de sistemas dinámicos tanto de manera gráfica, con pzplot, como de manera numérica, con pole y zero.
Examinar la ubicación de polos y ceros puede ser útil para tareas como el análisis de estabilidad o la identificación de pares polo-cero casi cancelados para simplificar el modelo. Este ejemplo compara dos sistemas de lazo cerrado que tienen la misma planta y diferentes controladores.
Cree modelos de sistemas dinámicos que representen los dos sistemas de lazo cerrado.
G = zpk([],[-5 -5 -10],100); C1 = pid(2.9,7.1); CL1 = feedback(G*C1,1); C2 = pid(29,7.1); CL2 = feedback(G*C2,1);
El controlador C2 tiene una ganancia proporcional mucho mayor. De lo contrario, los dos sistemas de lazo cerrado CL1 y CL2 serían iguales.
Examine de manera gráfica la ubicación de polos y ceros de CL1 y CL2.
pzplot(CL1,CL2) grid
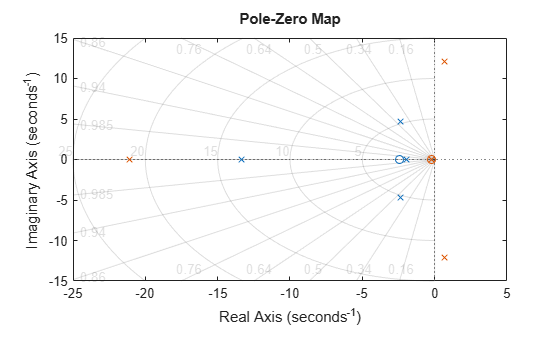
pzplot representa la ubicación de polos y ceros en el plano complejo como marcas x y o, respectivamente. Si proporciona múltiples modelos, pzplot representa los polos y ceros de cada modelo en un color diferente. En este ejemplo, los polos y ceros de CL1 son azules, y los de CL2 son verdes.
La gráfica muestra que todos los polos de CL1 están en el semiplano izquierdo y, por lo tanto, CL1 es estable. Las marcas en la cuadrícula radial de la gráfica muestran que el amortiguación de los polos oscilantes (complejos) es aproximadamente 0,45. La gráfica también muestra que CL2 contiene polos en el semiplano derecho y, por lo tanto, es inestable.
Calcule los valores numéricos de la ubicación de polos y ceros de CL2.
z = zero(CL2); p = pole(CL2);
zero y pole devuelven vectores columna que contienen la ubicación de polos y ceros del sistema.