spapi
Interpolación por splines
Sintaxis
Descripción
spline = spapi(knots,x,y)
k = length(knots) - length(x)
knots para el que (*) f(x(j)) = y(:,j), all j.
x son las mismas, entonces:
siendo y Dmf la derivada m-ésima de f. En este caso, la repetición de factor r de un sitio z en x corresponde a la prescripción de valor y las primeras derivadas r – 1 de f en z. Para igualar la media de todos los valores de datos con los mismos datos en su lugar, llame a spapi con un cuarto argumento adicional.
Los valores de datos, y(:,j), pueden ser escalares, vectores, matrices o arreglos n-dimensionales.
spapi(, siendo k,x,y)k un entero positivo, especifica el orden del spline deseado, k. En este caso, la función spapi llama a la función aptknt para determinar una secuencia de nudos viable, pero no necesariamente óptima, para los sitios indicados x. En otras palabras, el comando spapi(k,x,y) tiene el mismo efecto que el comando más explícito spapi(aptknt(x,k),x,y).
spapi({knork1,...,knorkm},{x1,...,xm},y) devuelve el B-form de una interpolación por splines de producto tensorial a datos de malla. Aquí, cada knorki es una secuencia de nudos o un entero positivo que especifica el orden polinomial usado en la variable i-ésima. La función spapi proporciona entonces una secuencia de nudos correspondiente para la variable i-ésima. Además, y debe ser un arreglo (r+m)-dimensional, siendo y(:,i1,...,im) el dato que ajustar en el sitio [x{1}(i1),...,x{m}(im)], para todo i1, ..., im. En contraposición al caso univariado, si el spline tiene valor escalar, entonces y puede ser un arreglo m-dimensional.
spapi(...,'noderiv'), con el vector de caracteres o escalar de cadena 'noderiv' como cuarto argumento, tiene el mismo efecto que spapi(...) salvo que los valores de datos que comparten el mismo sitio se interpretan de manera diferente. Con el cuarto argumento presente, la media de los valores de datos con el mismo sitio de datos se interpola en dicho sitio. Sin él, los valores de datos con el mismo sitio de datos se interpretan como valores de derivadas sucesivas que deben emparejarse en dicho sitio, tal como se ha descrito anteriormente, en el primer párrafo de esta descripción.
Ejemplos
La función spapi([0 0 0 0 1 2 2 2 2],[0 1 1 1 2],[2 0 1 2 -1]) produce el spline cúbico único f en el intervalo [0...2] con exactamente un nudo interior, en 1, que satisface las cinco condiciones
Entre ellas se incluye la triple coincidencia en 1, es decir, la coincidencia allí con los valores prescritos de la función y sus dos primeras derivadas.
A continuación se muestra un ejemplo de interpolación oscilatoria, a los valores y y pendientes s en los sitios x por un spline de quinto grado:
sp = spapi(augknt(x,6,2),[x,x,min(x),max(x)],[y,s,ddy0,ddy1]);
siendo ddy0 y ddy1 valores de la segunda derivada en los puntos finales.
Como ejemplo relacionado, si quiere interpolar la función sin(x) en los sitios de datos precisos mediante un spline cúbico e igualar su pendiente en una subsecuencia x(s), llame a la función spapi con estos argumentos:
sp = spapi(4,[x x(s)], [sin(x) cos(x(s))]).
La función aptknt proporcionará una secuencia de nudos adecuada. Si quiere interpolar los mismos datos por splines de quinto grado, solo tiene que cambiar el valor 4 a 6.
Como ejemplo de bivariada, a continuación se muestra una interpolación bivariada.
x = -2:.5:2; y = -1:.25:1; [xx, yy] = ndgrid(x,y);
z = exp(-(xx.^2+yy.^2));
sp = spapi({3,4},{x,y},z); fnplt(sp)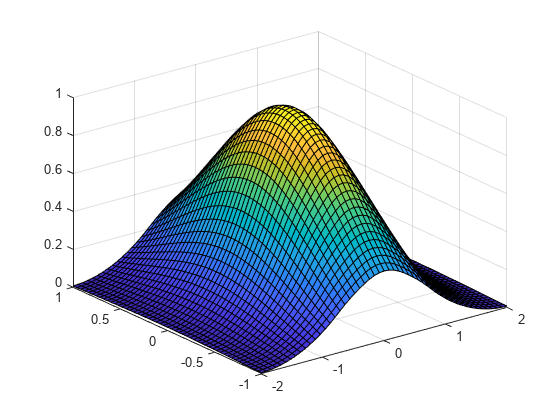
Como ilustración de la interpolación oscilatoria a datos de malla, a continuación se muestra una interpolación bicúbica completa en la que los datos se derivan explícitamente del polinomio bicúbico . Esto resulta práctico para ver exactamente dónde deben colocarse las pendientes y las pendientes de las pendientes (las derivadas cruzadas) en los valores de datos suministrados. Puesto que g es un polinomio bicúbico, su interpolación, f, debe ser el propio g. Pruebe lo siguiente:
sites = {[0,1],[0,2]}; coefs = zeros(4,4); coefs(1,1) = 1;
g = ppmak(sites,coefs);
Dxg = fnval(fnder(g,[1,0]),sites);
Dyg = fnval(fnder(g,[0,1]),sites);
Dxyg = fnval(fnder(g,[1,1]),sites);
f = spapi({4,4}, {sites{1}([1,2,1,2]),sites{2}([1,2,1,2])}, ...
[fnval(g,sites), Dyg ; ...
Dxg.' , Dxyg]);
if any( squeeze( fnbrk(fn2fm(f,'pp'), 'c') ) - coefs )
'something went wrong', endArgumentos de entrada
Argumentos de salida
Limitaciones
Los puntos (univariados) y los sitios dados deben satisfacer las condiciones de Schoenberg-Whitney para que se defina la interpolación. Si la secuencia de sitios x es no decreciente, entonces
con igualdad posible en knots(1) y knots(end). En el caso multivariante, estas condiciones deben cumplirse por separado en cada variable.
Algoritmos
La función llama a spcol para proporcionar la matriz de colocación casi diagonal de bloques (Bj,k(x)) (con repeticiones en x que denotan derivadas, como se ha descrito anteriormente) y slvblk resuelve el sistema lineal (*) usando una factorización QR en bloque.
La función ajusta los datos de malla, en forma de producto tensorial, variable por variable, aprovechando el hecho de que un ajuste spline univariado depende linealmente de los valores que se están ajustando.
Historial de versiones
Introducido en R2006b