dsp.IIRFilter
Infinite impulse response (IIR) filter
Description
The dsp.IIRFilter
System object™ filters each channel of the input using the specified filter. You can specify
the filter to have a 'Direct form I', 'Direct form I
transposed', 'Direct form II', or a 'Direct form II
transposed' structure.
Use the Numerator and Denominator properties to specify the coefficients of the filter
numerator and denominator coefficients. In addition to these coefficients, you can also
specify nonzero initial filter states through the InitialConditions
property.
To filter a signal using an IIR filter:
Create the
dsp.IIRFilterobject and set its properties.Call the object with arguments, as if it were a function.
To learn more about how System objects work, see What Are System Objects?
Creation
Syntax
Description
iir = dsp.IIRFilter
iir = dsp.IIRFilter(num,den)Numerator property to
num and the Denominator property to
den. (since R2024a)
iir = dsp.IIRFilter(___,SampleRate=Value)"normalized". (since R2026a)
To specify an input sample rate of 22050 Hz, set
SampleRate to 22050. To specify the input sample rate in normalized
units, set SampleRate to "normalized". (since R2026a)
iir = dsp.IIRFilter(___,PropertyName=Value)
Example: iir = dsp.IIRFilter(Structure='Direct form I') creates a
dsp.IIRFilter object with the Structure property
set to 'Direct form I'.
Properties
Usage
Syntax
Description
Input Arguments
Output Arguments
Object Functions
To use an object function, specify the
System object as the first input argument. For
example, to release system resources of a System object named obj, use
this syntax:
release(obj)
For a list of filter analysis methods this object supports, type
dsp.IIRFilter.helpFilterAnalysis in the MATLAB® command prompt. For the corresponding function reference pages, see Analysis Functions for Filter System Objects.
Examples
Filter a noisy sinusoidal signal using a lowpass Butterworth IIR filter.
Input Signal
The input signal has three tones, 1 kHz, 5 kHz, and 12 kHz.
Sine1 = dsp.SineWave(Frequency=1e3,... SampleRate=44.1e3); Sine2 = dsp.SineWave(Frequency=5e3,... SampleRate=44.1e3); Sine3 = dsp.SineWave(Frequency=12e3,... SampleRate=44.1e3);
Filter Design
Use the butter function to design a 10th order lowpass Butterworth filter.
N = 10; Fc = 0.4; [b,a] = butter(N,Fc);
Create a dsp.IIRFilter object and assign the designed coefficients to the Numerator and the Denominator properties.
iir = dsp.IIRFilter(b,a)
iir =
dsp.IIRFilter with properties:
Structure: 'Direct form II transposed'
Numerator: [4.9945e-04 0.0050 0.0225 0.0599 0.1049 0.1259 0.1049 0.0599 0.0225 0.0050 4.9945e-04]
Denominator: [1 -1.9924 3.0195 -2.8185 2.0387 -1.0545 0.4144 -0.1157 0.0225 -0.0027 1.4876e-04]
InitialConditions: 0
Show all properties
View the magnitude response of the filter. The cutoff frequency is at 0.4 rad/sample, which, with a sample rate of 44.1 kHz, translates to or 8.82 kHz.
filterAnalyzer(iir,SampleRates=Sine1.SampleRate)

View the power spectrum of the input and output signal using the Spectrum Analyzer.
sa = spectrumAnalyzer(SampleRate=Sine1.SampleRate,... Method='welch',... PlotAsTwoSidedSpectrum=false,... OverlapPercent=80,... SpectrumUnits='dBW',... YLimits=[-220 -10]);
Streaming
Add zero-mean white Gaussian noise with a standard deviation of 0.01 to the sum of sine waves. Filter the signal using the IIR filter.
The tones at 1 kHz and 5 kHz are unaffected since they fall in the passband. The frequency at 12 kHz is attenuated since it falls in the transition band of the filter.
for i = 1:5000 input = Sine1()+Sine2()+Sine3()+... 0.01*randn(Sine1.SamplesPerFrame,1); output = iir(input); sa(input,output) end

Design a notching comb filter with 8 notches, and a notch bandwidth of 0.02 referenced to a -3 dB level.
Create a comb filter design specification object using the fdesign.comb function and specify these design parameters.
combSpecs = fdesign.comb('notch','N,BW',8,0.02);
Design the notching comb filter using the design function. The resulting filter is a dsp.IIRFilter System object™. For details on how to apply this filter on streaming data, refer to dsp.IIRFilter.
iirFilt = design(combSpecs,Systemobject=true)
iirFilt =
dsp.IIRFilter with properties:
Structure: 'Direct form II'
Numerator: [0.8878 0 0 0 0 0 0 0 -0.8878]
Denominator: [1 0 0 0 0 0 0 0 -0.7757]
InitialConditions: 0
Show all properties
View magnitude response of the designed filter.
filterAnalyzer(iirFilt)

Since R2026a
Specify the input sample rate explicitly while constructing the dsp.IIRFilter object using the SampleRate argument.
iirFilt = dsp.IIRFilter(SampleRate=22050)
iirFilt =
dsp.IIRFilter with properties:
Structure: 'Direct form II transposed'
Numerator: [1 1]
Denominator: [1 0.1000]
InitialConditions: 0
Show all properties
You can view this information using the Input sample rate field of the info function.
info(iirFilt)
ans = 8×47 char array
'Discrete-Time IIR Filter (real) '
'------------------------------- '
'Filter Structure : Direct-Form II Transposed'
'Numerator Length : 2 '
'Denominator Length : 2 '
'Stable : Yes '
'Linear Phase : No '
'Input sample rate : 22050 '
Visualize the frequency response of the filter using filterAnalyzer. Note the frequency range from 0 to 11025 Hz.
filterAnalyzer(iirFilt,FilterNames="InputSampleRate22050Hz")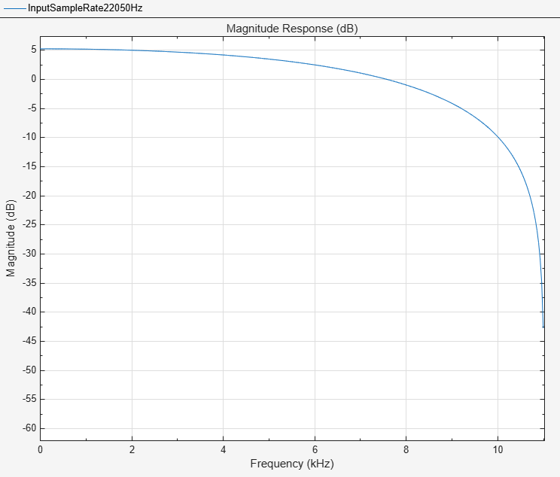
To specify the input sample rate after constructing the object, use the setInputSampleRate function.
setInputSampleRate(iirFilt,44100)
To confirm, view the sample rate information using the info function.
info(iirFilt)
ans = 8×47 char array
'Discrete-Time IIR Filter (real) '
'------------------------------- '
'Filter Structure : Direct-Form II Transposed'
'Numerator Length : 2 '
'Denominator Length : 2 '
'Stable : Yes '
'Linear Phase : No '
'Input sample rate : 44100 '
Visualize the frequency response of the filter using filterAnalyzer. Note the change in frequency interval from 0 to 22050 Hz.
filterAnalyzer(iirFilt,FilterNames="InputSampleRate44100Hz")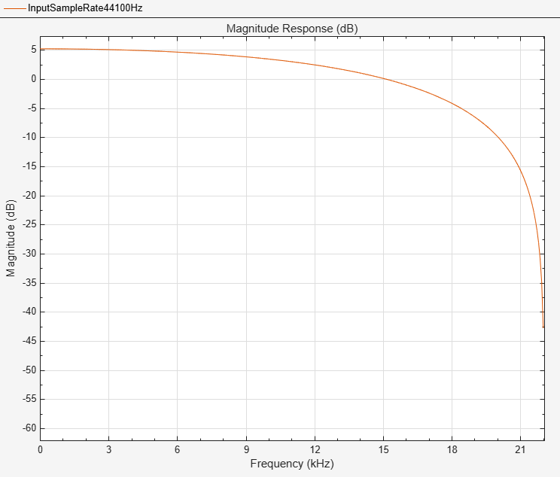
More About
The dsp.IIRFilter
System object supports the following filter structures. The diagrams in each section show
the data types used in the filter structures for fixed-point signals. You can set the data
types using the fixed-point properties of the object.

The following constraints apply when the Structure property is
set to 'Direct form I':
Inputs can be real or complex.
Numerator and denominator coefficients can be real or complex.
Numerator and denominator coefficients must have the same complexity characteristics. When the numerator and denominator coefficients have different complexities from each other, the object processes the filter as if two sets of complex coefficients are provided. The real-valued coefficient set is treated as if it is a complex vector with zero-valued imaginary parts.
The State data type cannot be specified for this structure. Doing so is not possible because the input and output states have the same data types as the input and output buffers.

The following constraints apply when the Structure property is
set to 'Direct form I transposed':
Inputs can be real or complex.
Numerator and denominator coefficients can be real or complex.
Numerator and denominator coefficients must have the same complexity characteristics. When the numerator and denominator coefficients have different complexities from each other, the object processes the filter as if two sets of complex coefficients are provided. The real-valued coefficient set is treated as if it is a complex vector with zero-valued imaginary parts.
States are complex when either the input or the coefficients are complex.


The following constraints apply when the Structure property is
set to 'Direct form II':
Inputs can be real or complex.
Numerator and denominator coefficients can be real or complex.
Numerator and denominator coefficients must have the same complexity characteristics. When the numerator and denominator coefficients have different complexities from each other, the object processes the filter as if two sets of complex coefficients are provided. The real-valued coefficient set is treated as if it is a complex vector with zero-valued imaginary parts.
States are complex when either the inputs or the coefficients are complex.


The following constraints apply when the Structure property is
set to 'Direct form II transposed':
Inputs can be real or complex.
Numerator and denominator coefficients can be real or complex.
Numerator and denominator coefficients must have the same complexity characteristics. When the numerator and denominator coefficients have different complexities from each other, the object processes the filter as if two sets of complex coefficients are provided. The real-valued coefficient set is treated as if it is a complex vector with zero-valued imaginary parts.
States are complex when either the inputs or the coefficients are complex.
