pointNetPlusClassifier
Description
Add-On Required: This feature requires the Lidar Toolbox Model for PointNet++ Classification add-on.
The pointNetPlusClassifier object creates a PointNet++ network
[1] to classify 3-D point
clouds that contain only one object. Using this object, you can:
Create a pretrained 3-D point cloud classification model by using a PointNet++ deep learning network trained on the Sydney Urban Objects data set [2].
Classify 3-D point clouds by using the
classifyobject function.If you have the training data, you can create an untrained
pointNetPlusClassifierobject and use thetrainPointNetPlusClassifierfunction to train the network. Using this function, you can also perform transfer learning to retrain a pretrained network.
Creation
Syntax
Description
classifier = pointNetPlusClassifier
classifier = pointNetPlusClassifier(weights,classNames)
If you specify weights as "sydney-urban", the
function creates a pretrained network and configures it to perform transfer learning using
the specified set of classes. For optimal results, train the network on new training data
before performing classification. Use the trainPointNetPlusClassifier function to train the network.
If you specify weights as "random", the
function creates an untrained network. To train the network, use the trainPointNetPlusClassifier function.
classifier = pointNetPlusClassifier(weights,classNames,Name=Value)ModelName="pointCloudClassifier" creates a
pointNetPlusClassifier object with the model name
"pointCloudClassifier".
Input Arguments
Name-Value Arguments
Output Arguments
Properties
Object Functions
classify | Classify point cloud using PointNet++ classifier |
Examples
Create a PointNet++ Classifier.
classifier = pointNetPlusClassifier;
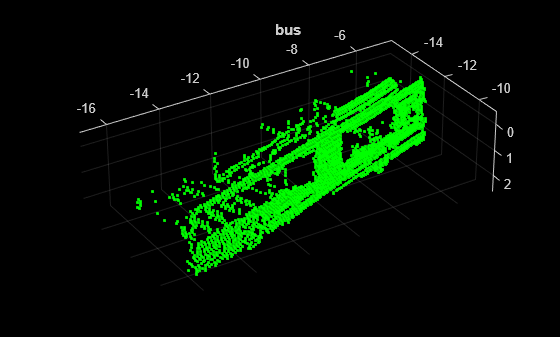
Read the input point cloud.
filename = "bus.pcd";
ptCloud = pcread(filename);Apply the pretrained PointNet++ classifier to the input point cloud.
class = classify(classifier,ptCloud);
Display the input point cloud and its predicted class.
pcshow(ptCloud.Location,[0 1 0], ... MarkerSize=40, ... VerticalAxisDir="down") title(class)
References
[1] Qi, Charles R., Li Yi, Hao Su, and Leonidas J. Guibas. “PointNet++: Deep Hierarchical Feature Learning on Point Sets in a Metric Space.” In Proceedings of the 31st International Conference on Neural Information Processing Systems, 5105–14. NIPS’17. Red Hook, NY, USA: Curran Associates Inc., 2017.
[2] De Deuge, Mark, Alastair Quadras, Calvin Hung, and Bertrand Douillard. "Unsupervised Feature Learning for Classification of Outdoor 3D Scans." In Australasian Conference on Robotics and Automation 2013 (ACRA 13). Sydney, Australia: ACRA, 2013.
Version History
Introduced in R2025a