nearestNeighbor
Determine nearest alpha shape boundary point
Syntax
Description
Examples
Create a set of 2-D points.
th = (pi/12:pi/12:2*pi)'; x1 = [reshape(cos(th)*(1:5), ... numel(cos(th)*(1:5)),1); 0]; y1 = [reshape(sin(th)*(1:5), ... numel(sin(th)*(1:5)),1); 0]; x = [x1;x1+15]; y = [y1;y1];
Create and plot an alpha shape with alpha radius equal to 1.
shp = alphaShape(x,y,1);
plot(shp)
hold on
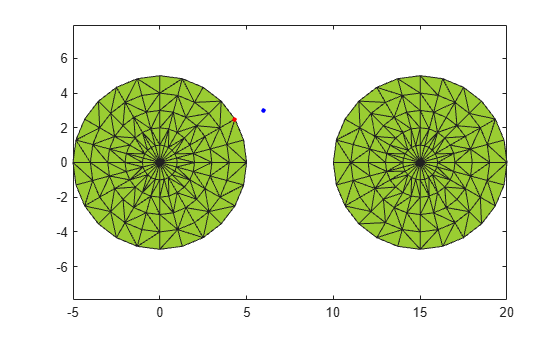
Compute the nearest shp boundary point to the query point QP. Plot the query point in blue and the nearest boundary neighbor in red.
QP = [6 3]; plot(QP(1),QP(2),"b.",MarkerSize=10) I = nearestNeighbor(shp,QP); plot(shp.Points(I,1),shp.Points(I,2),"r.",MarkerSize=10) hold off
Input Arguments
Output Arguments
Extended Capabilities
Version History
Introduced in R2015a