dsearchn
Nearest point search
Description
Examples
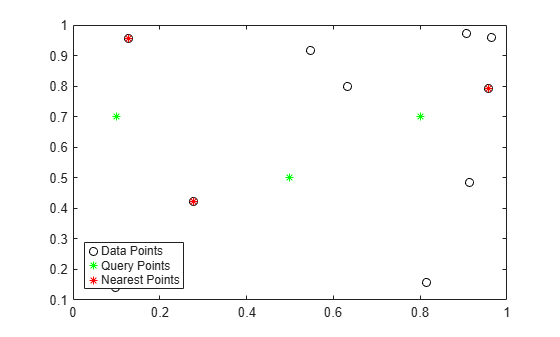
Create a matrix P of 2-D data points and a matrix PQ of 2-D query points. Find the nearest data point to each query point, and compute the corresponding distances.
rng default;
P = rand([10 2]);
PQ = [0.5 0.5; 0.1 0.7; 0.8 0.7];
[k,dist] = dsearchn(P,PQ);Plot the data points and query points, and highlight the data point nearest to each query point.
plot(P(:,1),P(:,2),"ko") hold on plot(PQ(:,1),PQ(:,2),"*g") hold on plot(P(k,1),P(k,2),"*r") legend("Data Points", ... "Query Points", ... "Nearest Points", ... Location="sw")
Display the distances.
dist
dist = 3×1
0.2349
0.2586
0.1825
Input Arguments
Output Arguments
References
[1] Barber, C.B., D.P. Dobkin, and H.T. Huhdanpaa. “The Quickhull Algorithm for Convex Hulls.” ACM Transactions on Mathematical Software, Vol. 22, No. 4, Dec. 1996, p 469–483.
Extended Capabilities
Version History
Introduced before R2006a