addMesh
Descripción
isAdded = addMesh(mTSDF,meshStruct)
Ejemplos
Crea dos cuadros de colisión y una esfera de colisión. Los cuadros de colisión representan un entorno estático y la esfera representa un obstáculo dinámico con una pose que podría cambiar en cualquier momento.
box1 = collisionBox(0.5,1,0.1);
box2 = collisionBox(0.5,0.1,0.2,Pose=trvec2tform([0 -0.45 0.15]));
sph = collisionSphere(0.125,Pose=trvec2tform([-0.1 0.25 0.75]));
showCollisionArray({box1,box2,sph});
title("Static Environment and Dynamic Obstacle")
v = [110 10];
view(v);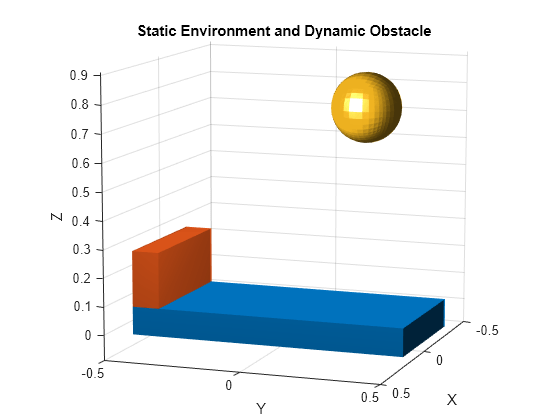
Cree un administrador de TSDF de malla con una resolución de 25 celdas por metro.
tsdfs = meshtsdf(Resolution=25);
Para mejorar la eficiencia del cálculo del campo de distancia con signo, combine mallas que representen el entorno estático.
staticMeshes = geom2struct({box1,box2});
staticEnv = staticMeshes(1);
staticEnv.Pose = eye(4);
staticEnv.Vertices = [];
staticEnv.Faces = [];
for i = 1:numel(staticMeshes)
H = staticMeshes(i).Pose;
V = staticMeshes(i).Vertices*H(1:3,1:3)'+ H(1:3,end)';
nVert = size(staticEnv.Vertices,1);
staticEnv.Vertices = [staticEnv.Vertices; V];
staticEnv.Faces = [staticEnv.Faces; staticMeshes(i).Faces+nVert];
end
staticEnv.ID = 1;Agregue la malla de entorno estático al administrador TSDF.
addMesh(tsdfs,staticEnv);
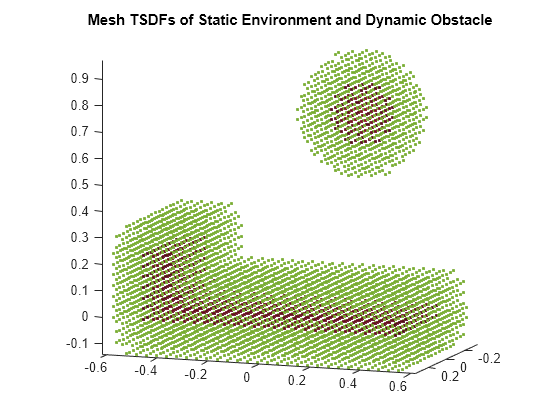
Convierte la geometría de colisión de esfera en una estructura para el administrador de malla TSDF. Asígnele un ID de 2 y agréguelo al administrador de malla TSDF.
obstacleID = 2; dynamicObstacle = geom2struct(sph,obstacleID); addMesh(tsdfs,dynamicObstacle); show(tsdfs) view(v) axis equal title("Mesh TSDFs of Static Environment and Dynamic Obstacle")
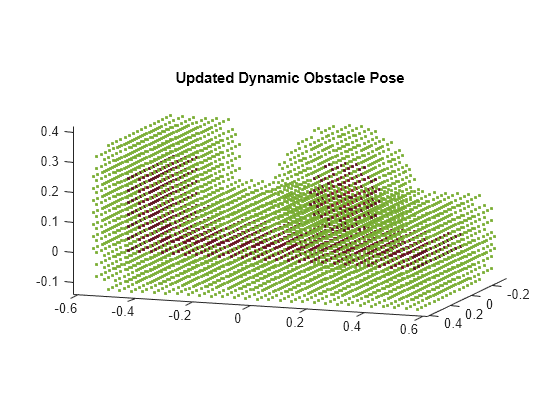
Actualice la pose del obstáculo dinámico en el administrador de malla TSDF cambiando la propiedad Pose del controlador de objeto del obstáculo. Luego, utilice la función updatePose para actualizar la pose de la malla en el administrador TSDF.
dynamicObstacle.Pose = trvec2tform([0.2 0.25 0.2]); updatePose(tsdfs,dynamicObstacle)
ans = 1
show(tsdfs) view(v) axis equal title("Updated Dynamic Obstacle Pose")
Argumentos de entrada
Argumentos de salida
Capacidades ampliadas
Historial de versiones
Introducido en R2024a