meshtsdf
Campo de distancia con signo truncado para regiones 3D que contienen mallas
Desde R2024a
Descripción
meshtsdf discretiza mallas y almacena sus campos de distancia con signo truncado (TSDF) asociados en un espacio 3-D voxelizado. Los vóxeles que están fuera de una malla contienen distancias positivas y los vóxeles que están dentro de una malla tienen distancias negativas. Cualquier vóxel que esté a más de una distancia de truncamiento especificada de las mallas tiene valores iguales a la distancia de truncamiento. Una vez que crea el TSDF, puede modificar las poses de las mallas y obtener información actualizada de distancia y gradiente en la región discretizada.
Creación
Descripción
mTSDF = meshtsdf
mTSDF = meshtsdf(meshStruct)geom2struct para convertir objetos geométricos en una matriz de estructuras de malla.
mTSDF = meshtsdf(___,Name=Value)meshtsdf(TruncationDistance=10) establece la distancia de truncamiento en 10 metros.
Argumentos de entrada
Propiedades
Funciones del objeto
activeVoxels | Devuelve información sobre los vóxeles activos |
addMesh | Agregar malla a malla TSDF |
copy | Copia profunda TSDF |
removeMesh | Quitar la malla de la malla TSDF |
distance | Calcular la distancia al nivel cero establecido para los puntos de consulta |
gradient | Calcular el gradiente del campo de distancia con signo truncado |
poses | Obtener poses para una o más mallas en TSDF |
updatePose | Actualizar la pose de la malla en TSDF |
show | Mostrar TSDF en la figura |
Ejemplos
Crea dos cuadros de colisión y una esfera de colisión. Los cuadros de colisión representan un entorno estático y la esfera representa un obstáculo dinámico con una pose que podría cambiar en cualquier momento.
box1 = collisionBox(0.5,1,0.1);
box2 = collisionBox(0.5,0.1,0.2,Pose=trvec2tform([0 -0.45 0.15]));
sph = collisionSphere(0.125,Pose=trvec2tform([-0.1 0.25 0.75]));
showCollisionArray({box1,box2,sph});
title("Static Environment and Dynamic Obstacle")
v = [110 10];
view(v);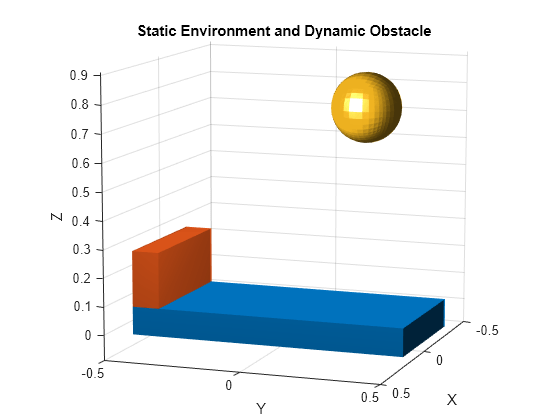
Cree un administrador de TSDF de malla con una resolución de 25 celdas por metro.
tsdfs = meshtsdf(Resolution=25);
Para mejorar la eficiencia del cálculo del campo de distancia con signo, combine mallas que representen el entorno estático.
staticMeshes = geom2struct({box1,box2});
staticEnv = staticMeshes(1);
staticEnv.Pose = eye(4);
staticEnv.Vertices = [];
staticEnv.Faces = [];
for i = 1:numel(staticMeshes)
H = staticMeshes(i).Pose;
V = staticMeshes(i).Vertices*H(1:3,1:3)'+ H(1:3,end)';
nVert = size(staticEnv.Vertices,1);
staticEnv.Vertices = [staticEnv.Vertices; V];
staticEnv.Faces = [staticEnv.Faces; staticMeshes(i).Faces+nVert];
end
staticEnv.ID = 1;Agregue la malla de entorno estático al administrador TSDF.
addMesh(tsdfs,staticEnv);
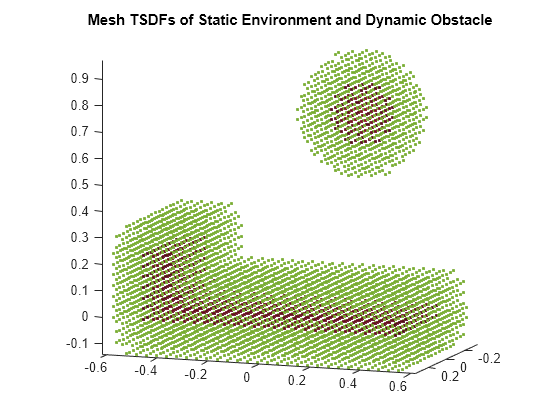
Convierte la geometría de colisión de esfera en una estructura para el administrador de malla TSDF. Asígnele un ID de 2 y agréguelo al administrador de malla TSDF.
obstacleID = 2; dynamicObstacle = geom2struct(sph,obstacleID); addMesh(tsdfs,dynamicObstacle); show(tsdfs) view(v) axis equal title("Mesh TSDFs of Static Environment and Dynamic Obstacle")
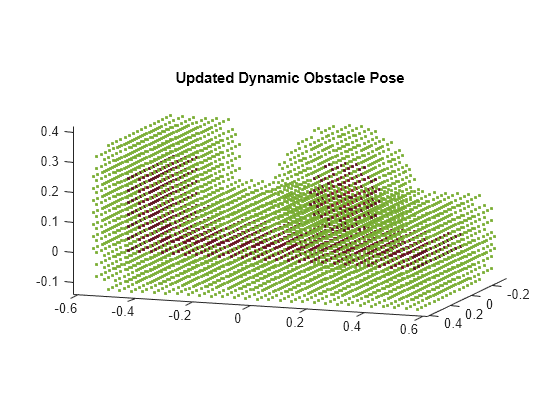
Actualice la pose del obstáculo dinámico en el administrador de malla TSDF cambiando la propiedad Pose del controlador de objeto del obstáculo. Luego, utilice la función updatePose para actualizar la pose de la malla en el administrador TSDF.
dynamicObstacle.Pose = trvec2tform([0.2 0.25 0.2]); updatePose(tsdfs,dynamicObstacle)
ans = 1
show(tsdfs) view(v) axis equal title("Updated Dynamic Obstacle Pose")
Limitaciones
meshtsdfadmitepackNGo(MATLAB Coder) sólo para destinos de host MATLAB®.
Referencias
[1] Zhao, Hongkai. “A Fast Sweeping Method for Eikonal Equations.” Mathematics of Computation 74, no. 250 (May 21, 2004): 603–27. https://doi.org/10.1090/S0025-5718-04-01678-3.
Capacidades ampliadas
Historial de versiones
Introducido en R2024a
Consulte también
Temas
- Pick-And-Place Workflow Using CHOMP for Manipulators (Robotics System Toolbox)