poseplot
Sintaxis
Descripción
La función poseplot traza una pose 3-D especificada (posición y orientación) como un parche con un marco xyz en el origen del parche.
poseplot traza la pose en la posición de origen de coordenadas con rotación cero. El marco de navegación predeterminado es el marco noreste abajo (NED).
poseplot( traza la pose con la orientación especificada. La posición por defecto es orientation)[0 0 0].
poseplot(___, especifica el marco de navegación del gráfico de pose. frame)
poseplot(___, especifica las propiedades del parche de pose usando uno o más argumentos de nombre-valor. Por ejemplo, Name=Value)poseplot(PatchFaceColor="r") traza la pose con el color de cara rojo. Para obtener una lista de propiedades, consulte Propiedades PosePatch.
poseplot( especifica los ejes principales del gráfico de pose.ax,___)
p = poseplot(___)PosePatch. Utilice p para modificar las propiedades del parche de pose después de su creación. Para obtener una lista de propiedades, consulte Propiedades PosePatch.
Ejemplos
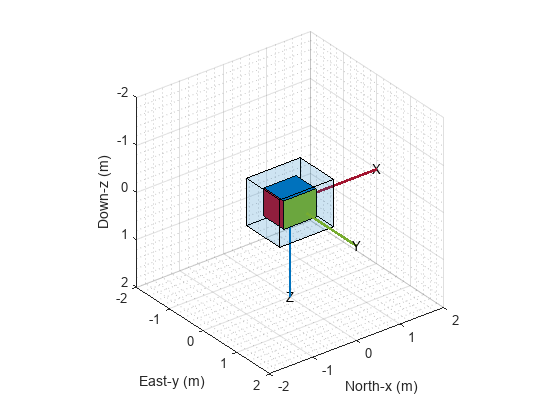
Grafique la pose predeterminada utilizando la función poseplot con la configuración predeterminada.
poseplot xlabel("North-x (m)") ylabel("East-y (m)") zlabel("Down-z (m)");
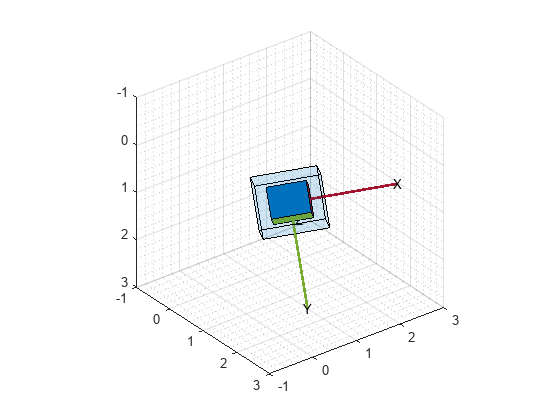
A continuación, traza una pose con una orientación y posición específicas.
q = quaternion([35 10 50],"eulerd","ZYX","frame"); position = [1 1 1]; poseplot(q,position)
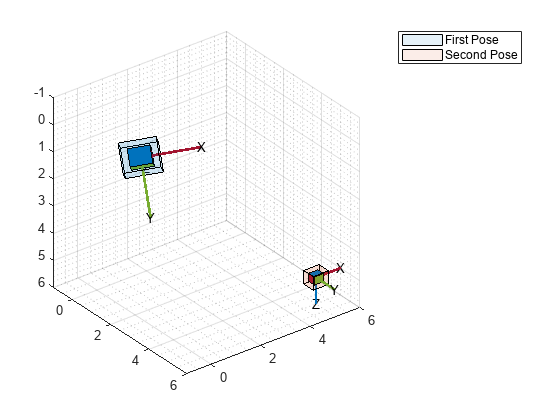
Luego, traza una segunda pose en la figura y devuelve el objeto PosePatch. Grafique la segunda pose con un tamaño más pequeño utilizando el argumento nombre-valor ScaleFactor.
hold on
p = poseplot(eye(3),[5 5 5],ScaleFactor=0.5)p =
PosePatch with properties:
Orientation: [3×3 double]
Position: [5 5 5]
Show all properties
legend("First Pose","Second Pose") hold off
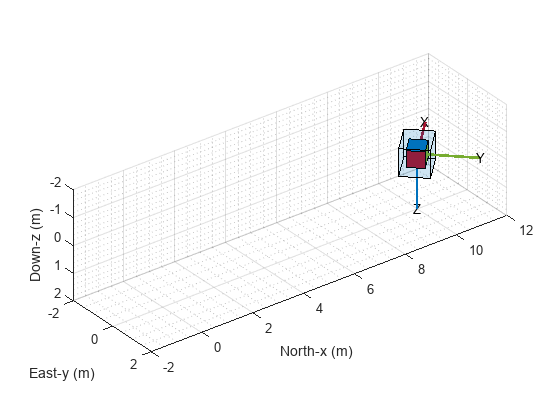
Anime una serie de poses usando la función poseplot. Primero, defina las posiciones inicial y final.
ps = [0 0 0]; pf = [10 0 0];
Luego, defina las orientaciones inicial y final utilizando el objeto quaternion.
qs = quaternion([45,0,0],'eulerd','ZYX','frame'); qf = quaternion([-45,0,0],'eulerd','ZYX','frame');
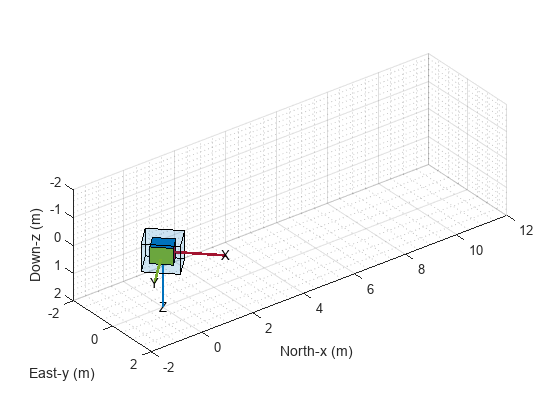
Muestra la pose inicial.
patch = poseplot(qs,ps); ylim([-2 2]) xlim([-2 12]) xlabel("North-x (m)") ylabel("East-y (m)") zlabel("Down-z (m)");
Cambie la posición y la orientación continuamente usando coeficientes y actualice la pose usando la función de objeto set.
for coeff = 0:0.01:1 q = slerp(qs,qf,coeff); position = ps + (pf - ps)*coeff; set(patch,Orientation=q,Position=position); drawnow end
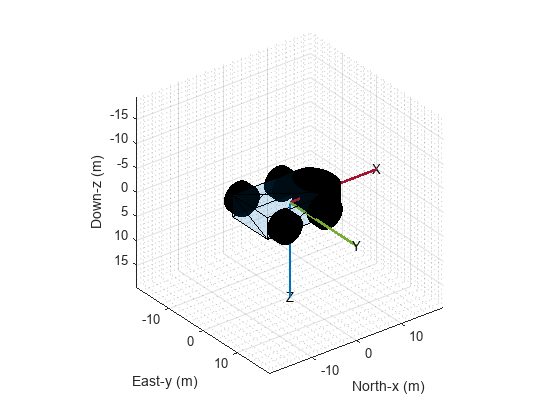
Grafique orientaciones y posiciones en mallas utilizando la función poseplot. Primero, trace un vehículo terrestre en el origen con rotación cero.
poseplot(ones("quaternion"),[0 0 0],MeshFileName="groundvehicle.stl",ScaleFactor=0.3); xlabel("North-x (m)") ylabel("East-y (m)") zlabel("Down-z (m)")
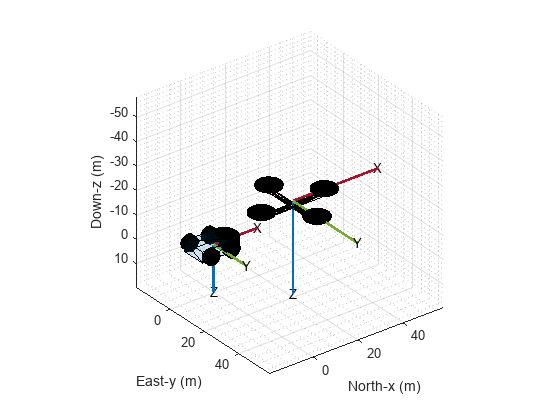
En segundo lugar, grafique un rotor en la posición [20 20 -20] con rotación cero.
hold on poseplot(ones("quaternion"),[20 20 -20],MeshFileName="multirotor.stl",ScaleFactor=0.2);
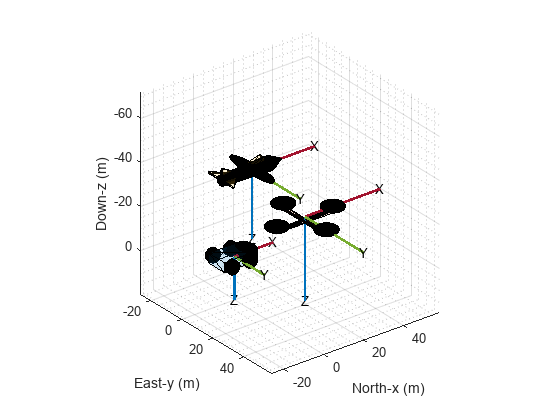
Por último, grafique un avión de ala fija en la posición [5 5 -40] con rotación cero.
poseplot(ones("quaternion"),[5 5 -40],MeshFileName="fixedwing.stl",ScaleFactor=0.4); view([-37.8 28.4]) hold off
Argumentos de entrada
Argumentos de par nombre-valor
Especifique pares de argumentos opcionales como Name1=Value1,...,NameN=ValueN, donde Name es el nombre del argumento y Value es el valor correspondiente. Los argumentos nombre-valor deben aparecer después de los otros argumentos, pero el orden de los pares no importa.
Ejemplo: poseplot(PatchFaceAlpha=0.1)
Las propiedades PosePatch enumeradas aquí son solo un subconjunto. Para obtener una lista completa, consulte Propiedades PosePatch.
Orientación del gráfico de pose, especificada como un objeto quaternion (Sensor Fusion and Tracking Toolbox) o una matriz de rotación.
Posición del gráfico de pose, especificada como un vector de valor real de tres elementos.
Nombre del archivo de malla Standard Triangle Language (STL), especificado como un escalar de cadena o un vector de caracteres que contiene el nombre del archivo de malla. Cuando se especifica este argumento, la función poseplot traza la malla en lugar del cuadro de orientación.
Factor de escala del gráfico de pose, especificado como un escalar no negativo. El factor de escala controla el tamaño del cuadro de orientación. Cuando se especifica el argumento MeshFileName, el factor de escala también cambia la escala de la malla.
Color de la cara del parche, especificado como un triplete RGB, un código de color hexadecimal, un nombre de color o un nombre corto.
Un triplete RGB es un vector fila de tres elementos cuyos elementos especifican las intensidades de los componentes rojo, verde y azul del color. Las intensidades deben estar en el rango
[0, 1]; por ejemplo,[0.4 0.6 0.7].Un código de color hexadecimal es un vector de caracteres o un escalar de cadena que comienza con un símbolo numeral (
#) seguido de tres o seis dígitos hexadecimales, que pueden variar de0aF. Los valores no distinguen entre mayúsculas y minúsculas. Por lo tanto, los códigos de color"#FF8800","#ff8800","#F80"y"#f80"son equivalentes.
Aquí hay una lista de colores comúnmente utilizados y sus valores correspondientes.
| Nombre del color | Nombre corto | Triplete RGB | Código de color hexadecimal | Apariencia |
|---|---|---|---|---|
"red" | "r" | [1 0 0] | "#FF0000" |
|
"green" | "g" | [0 1 0] | "#00FF00" |
|
"blue" | "b" | [0 0 1] | "#0000FF" |
|
"cyan" | "c" | [0 1 1] | "#00FFFF" |
|
"magenta" | "m" | [1 0 1] | "#FF00FF" |
|
"yellow" | "y" | [1 1 0] | "#FFFF00" |
|
"black" | "k" | [0 0 0] | "#000000" |
|
"white" | "w" | [1 1 1] | "#FFFFFF" |
|








Transparencia de la cara del parche, especificada como un escalar en el rango [0, 1]. Un valor de 1 es completamente opaco y 0 es completamente transparente.
Argumentos de salida
Historial de versiones
Introducido en R2021b