interp1
Sintaxis
Descripción
vq = interp1(x,v,xq)x especifica los puntos de muestra y v especifica los cuaterniones que contienen los valores correspondientes v(x). xq especifica los puntos de consulta. De forma predeterminada, la función utiliza el método de interpolación "slerp-short".
vq = interp1(v,xq)v:
Cuando
ves un vector de cuaterniones, los puntos predeterminados son1:length(v).Cuando
ves un arreglo de cuaterniones, los puntos predeterminados son1:size(v,1).
Utilice esta sintaxis cuando no le preocupen las distancias absolutas entre los puntos de muestra.
vq = interp1(v,xq,method,extrapolation)
Ejemplos
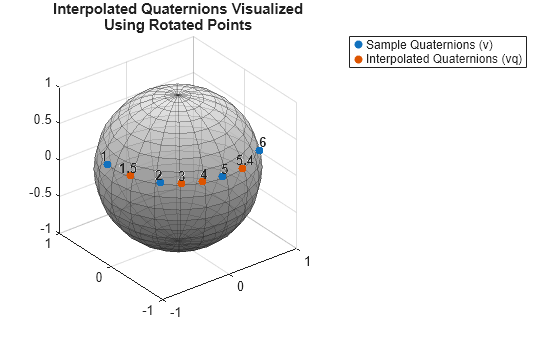
Define los puntos de muestra x y los valores de muestra correspondientes v.
x = [1 2 5 6]; eul = [-185:45:-50; -20*ones(1,4); zeros(1,4)]'; v = quaternion(eul,"eulerd","ZYX","frame");
Define los puntos de consulta en el rango de x.
xq = [1.5 3 4 5.4];
Interpolar en los puntos de consulta.
vq = interp1(x,v,xq);
Para visualizar el resultado, gire el mismo punto utilizando la muestra y los cuaterniones interpolados.
pts_samples = rotatepoint(v,[1.05 0 0]); pts_query = rotatepoint(vq,[1.05 0 0]);
Grafique una esfera unitaria y luego grafique los cuaterniones de muestra e interpolados en la esfera.
figure [X,Y,Z] = sphere; surf(X,Y,Z,FaceAlpha=0.5,EdgeAlpha=0.35) colormap gray hold on scatter3(pts_samples(:,1),pts_samples(:,2),pts_samples(:,3),"filled") scatter3(pts_query(:,1),pts_query(:,2),pts_query(:,3),"filled") exampleHelperAnnotateQuats(pts_samples,pts_query,x,xq,10,1.05) axis equal title(["Interpolated Quaternions Visualized","Using Rotated Points"]) legend("","Sample Quaternions (v)","Interpolated Quaternions (vq)")
Definir un conjunto de valores de función.
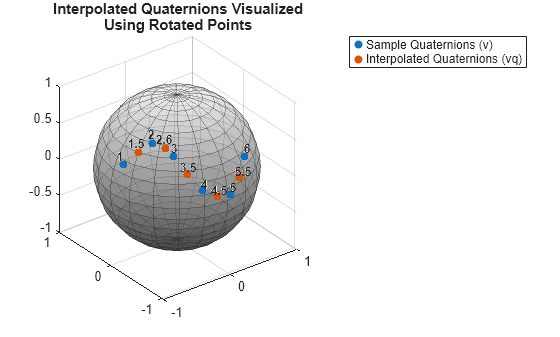
eul = [-170:20:-70; -20*sind(0:72:360)-25; zeros(1,6)]'; v = quaternion(eul,"eulerd","ZYX","frame");
Define un conjunto de puntos de consulta que se encuentran entre los puntos predeterminados, 1:6. En este caso, los puntos predeterminados son 1:6 porque v es una matriz de cuaterniones de seis elementos.
xq = [1.5 2.6 3.5 4.5 5.5];
Evalúa v en xq utilizando el método de interpolación natural SQUAD. Tenga en cuenta que aquí puede utilizar el método de interpolación predeterminado "slerp-short", pero para la rotación de onda sinusoidal que describe esta función de cuaternión, SQUAD produce una ruta interpolada más suave.
vq = interp1(v,xq,"squad-natural");Para visualizar el resultado, gire un punto en el eje x utilizando los cuaterniones de muestra e interpolados.
pts_samples = rotatepoint(v,[1.05 0 0]); pts_query = rotatepoint(vq,[1.05 0 0]);
Grafique una esfera unitaria y luego grafique los cuaterniones de muestra e interpolados en la esfera.
figure [X,Y,Z] = sphere; surf(X,Y,Z,FaceAlpha=0.5,EdgeAlpha=0.35) colormap gray hold on scatter3(pts_samples(:,1),pts_samples(:,2),pts_samples(:,3),"filled") scatter3(pts_query(:,1),pts_query(:,2),pts_query(:,3),"filled") exampleHelperAnnotateQuats(pts_samples,pts_query,1:6,xq,9,1.05) axis equal title(["Interpolated Quaternions Visualized","Using Rotated Points"]) legend("","Sample Quaternions (v)","Interpolated Quaternions (vq)")
Define tres cuaterniones que representan diferentes orientaciones.
q0 = quaternion([0 0 0],"euler","ZYX","frame"); q1 = quaternion([pi/4 pi/6 pi/3],"euler","ZYX","frame"); q2 = quaternion([pi/2 pi/4 pi/2],"euler","ZYX","frame");
Crea un vector de tiempo para los fotogramas clave originales
x = [1 2 3];
Crear un vector de tiempo para la interpolación
T = linspace(0,3,300);
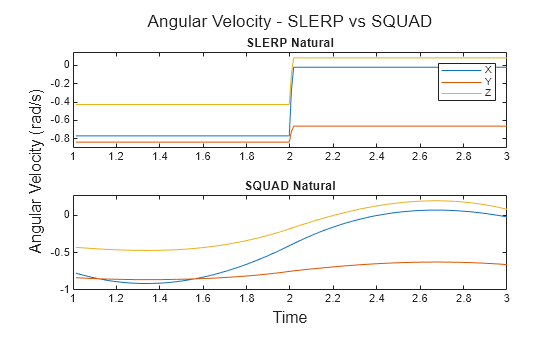
Interpolar utilizando interp1 con los métodos "slerp-natural" y "squad-natural".
quats_slerp = interp1(x,[q0 q1 q2],T,"slerp-natural")'; quats_squad = interp1(x,[q0 q1 q2],T,"squad-natural")';
Calcule las velocidades angulares para ambos métodos de interpolación.
ang_vel_slerp = angvel(quats_slerp,T(2)-T(1),"frame"); ang_vel_squad = angvel(quats_squad,T(2)-T(1),"frame");
Grafique las velocidades angulares.
tl = tiledlayout(2,1);
title(tl,"Angular Velocity - SLERP vs SQUAD")Grafique las velocidades angulares para las interpolaciones SLERP y SQUAD. Tenga en cuenta que la velocidad angular de la interpolación SQUAD es más suave que la interpolación que utiliza SLERP.
nexttile plot(T,ang_vel_slerp) ylim padded title("SLERP Natural") legend("X","Y","Z") nexttile plot(T,ang_vel_squad) ylim padded title("SQUAD Natural") xlabel(tl,"Time") ylabel(tl,"Angular Velocity (rad/s)")
Define los puntos de muestra x y los valores de muestra correspondientes v.
x = [0 1 2]; eul = [0 30 60; 0 20 60; zeros(1,3)]'; v = quaternion(eul,"eulerd","ZYX","frame");
Especifique los puntos de consulta xq para que se extiendan más allá del dominio de x.
xq = [-0.5 0.5 1.5 2.5];
Ahora evalúa v en xq usando el método de interpolación "slerp-short" y asigna cualquier valor fuera del dominio de x a un cuaternión con todas las partes establecidas en 0.
vq = interp1(x,v,xq,"slerp-short",ones("quaternion"))'
vq = 4×1 quaternion array
1 + 0i + 0j + 0k
0.98774 + 0.022751i - 0.084907j - 0.12903k
0.87097 + 0.151i - 0.30755j - 0.35217k
1 + 0i + 0j + 0k
Argumentos de entrada
Argumentos de salida
Algoritmos
Referencias
[1] Shoemake, Ken. "Animating Rotation with Quaternion Curves." ACM SIGGRAPH Computer Graphics 19, no. 3 (July 1985): 245–54. https://doi.org/10.1145/325165.325242.
[2] Dam, Erik B., Martin Koch, and Martin Lillholm. Quaternions, Interpolation and Animation. Technical Report DIKU-TR-98/5. Department of Computer Science, University of Copenhagen, July 17, 1998. https://web.mit.edu/2.998/www/QuaternionReport1.pdf.
Capacidades ampliadas
Historial de versiones
Introducido en R2025a