dormir
Interpolación lineal esférica
Descripción
Ejemplos
Crea dos cuaterniones con la siguiente interpretación:
a= rotación de 45 grados alrededor del eje zc= rotación de -45 grados alrededor del eje z
a = quaternion([45,0,0],"eulerd","ZYX","frame"); c = quaternion([-45,0,0],"eulerd","ZYX","frame");
Llame a slerp con los cuaterniones a y c y especifique un coeficiente de interpolación de 0,5.
interpolationCoefficient = 0.5; b = slerp(a,c,interpolationCoefficient);
La salida de slerp, b, representa una rotación promedio de a y c. Para verificar, convierta b a ángulos de Euler en grados.
averageRotation = eulerd(b,"ZYX","frame")
averageRotation = 1×3
0 0 0
El coeficiente de interpolación se especifica como un valor normalizado entre 0 y 1, inclusive. Un coeficiente de interpolación de 0 corresponde al cuaternión a, y un coeficiente de interpolación de 1 corresponde al cuaternión c. Llame a slerp con los coeficientes 0 y 1 para confirmar.
b = slerp(a,c,[0,1]); eulerd(b,"ZYX","frame")
ans = 2×3
45.0000 0 0
-45.0000 0 0
Puede crear rutas suaves entre cuaterniones especificando arreglos de coeficientes de interpolación igualmente espaciados.
path = 0:0.1:1; interpolatedQuaternions = slerp(a,c,path);
Para cuaterniones que representan rotación solo alrededor de un solo eje, especificar coeficientes de interpolación como equiespaciados da como resultado cuaterniones equiespaciados en ángulos de Euler. Convierta interpolatedQuaternions en ángulos de Euler y verifique que la diferencia entre los ángulos en la trayectoria sea constante.
k = eulerd(interpolatedQuaternions,"ZYX","frame"); abc = abs(diff(k))
abc = 10×3
9.0000 0 0
9.0000 0 0
9.0000 0 0
9.0000 0 0
9.0000 0 0
9.0000 0 0
9.0000 0 0
9.0000 0 0
9.0000 0 0
9.0000 0 0
Alternativamente, puede utilizar la función dist para verificar que la distancia entre los cuaterniones interpolados sea consistente. La función dist devuelve la distancia angular en radianes; conviértala a grados para una fácil comparación.
def = rad2deg(dist(interpolatedQuaternions(2:end),interpolatedQuaternions(1:end-1)))
def = 1×10
9.0000 9.0000 9.0000 9.0000 9.0000 9.0000 9.0000 9.0000 9.0000 9.0000
El algoritmo SLERP interpola a lo largo de una trayectoria de círculo máximo que conecta dos cuaterniones. Este ejemplo muestra cómo el algoritmo SLERP minimiza la trayectoria del círculo máximo.
Defina cuatro cuaterniones:
q0- cuaternión que indica que no hay rotación desde el marco globalq179- cuaternión que indica una rotación de 179 grados alrededor del eje zq180- cuaternión que indica una rotación de 180 grados alrededor del eje zq181- cuaternión que indica una rotación de 181 grados alrededor del eje z
q0 = ones(1,"quaternion"); q179 = quaternion([179,0,0],"eulerd","ZYX","frame"); q180 = quaternion([180,0,0],"eulerd","ZYX","frame"); q181 = quaternion([181,0,0],"eulerd","ZYX","frame");
Utilice slerp para interpolar entre q0 y las tres rotaciones de cuaterniones. Especifique que las rutas se recorren en 10 pasos.
T = linspace(0,1,10); q179path = slerp(q0,q179,T); q180path = slerp(q0,q180,T); q181path = slerp(q0,q181,T);
Traza cada ruta en términos de ángulos de Euler en grados.
q179pathEuler = eulerd(q179path,"ZYX","frame"); q180pathEuler = eulerd(q180path,"ZYX","frame"); q181pathEuler = eulerd(q181path,"ZYX","frame"); plot(T,q179pathEuler(:,1),"bo", ... T,q180pathEuler(:,1),"r*", ... T,q181pathEuler(:,1),"gd"); legend("Path to 179 degrees", ... "Path to 180 degrees", ... "Path to 181 degrees") xlabel("Interpolation Coefficient") ylabel("Z-Axis Rotation (Degrees)")
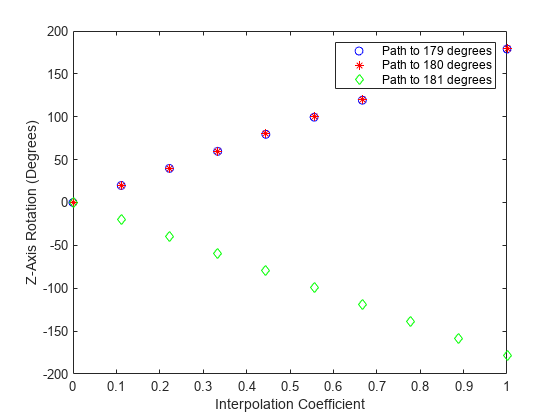
La ruta entre q0 y q179 es en el sentido de las agujas del reloj para minimizar la distancia del círculo máximo. La ruta entre q0 y q181 es en sentido antihorario para minimizar la distancia del círculo máximo. La ruta entre q0 y q180 puede ser en sentido horario o antihorario, dependiendo del redondeo numérico.
Crea dos cuaterniones.
q1 = quaternion([0 0 0],"eulerd","ZYX","frame"); q2 = quaternion([-180 90 180],"eulerd","ZYX","frame");
Defina el coeficiente de interpolación.
T = 0:0.01:1;
Interpolar cuaterniones utilizando los métodos de interpolación "short" y "natural".
quats_natural = slerp(q1,q2,T,"natural"); quats_short = slerp(q1,q2,T,"short");
Obtenga los puntos de rotación correspondientes.
pts_natural = rotatepoint(quats_natural,[1.05 0 0]); pts_short = rotatepoint(quats_short,[1.05 0 0]);
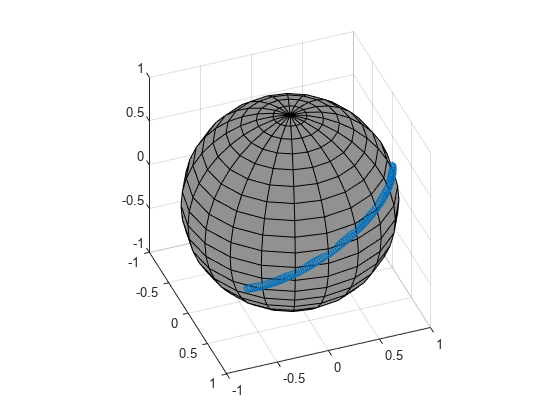
Muestre los cuaterniones interpolados en una esfera unitaria.
figure [X,Y,Z] = sphere; surf(X,Y,Z,FaceAlpha=0.5,EdgeAlpha=0.35) colormap gray hold on scatter3(pts_natural(:,1),pts_natural(:,2),pts_natural(:,3),"filled") scatter3(pts_short(:,1),pts_short(:,2),pts_short(:,3),"filled") view([45 36.60]) axis equal title("SLERP Short vs Natural") legend("","SLERP Natural","SLERP Short")
Argumentos de entrada
Argumentos de salida
Algoritmos
La interpolación lineal esférica de cuaterniones (SLERP) es una extensión de la interpolación lineal a lo largo de un plano a la interpolación esférica en tres dimensiones. El algoritmo fue propuesto por primera vez en [1]. Dados dos cuaterniones, q1 y q2, SLERP interpola un nuevo cuaternión, q0, a lo largo del círculo máximo que conecta q1 y q2. El coeficiente de interpolación, T, determina qué tan cerca está el cuaternión de salida de q1 y q2.
El algoritmo SLERP se puede describir en términos de sinusoides:
donde q1 y q2 son cuaterniones normalizados, y θ es la mitad de la distancia angular entre q1 y q2.
Referencias
[1] Shoemake, Ken. "Animating Rotation with Quaternion Curves." ACM SIGGRAPH Computer Graphics 19, no. 3 (July 1985): 245–54. https://doi.org/10.1145/325165.325242.