punto de rotación
Rotación del punto cuaternión
Descripción
rotationResult = rotatepoint(quat,cartesianPoints)quat. Los elementos del cuaternión se normalizan antes de su uso en la rotación.
Ejemplos
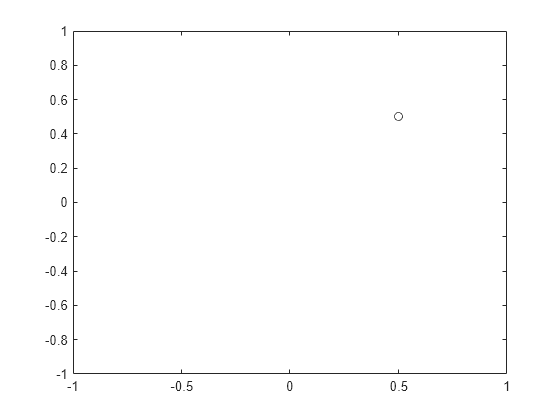
Definir un punto en tres dimensiones. Las coordenadas de un punto siempre se especifican en orden x, y, z. Para una visualización conveniente, defina el punto en el plano x-y.
x = 0.5; y = 0.5; z = 0; plot(x,y,"ko") hold on axis([-1 1 -1 1])
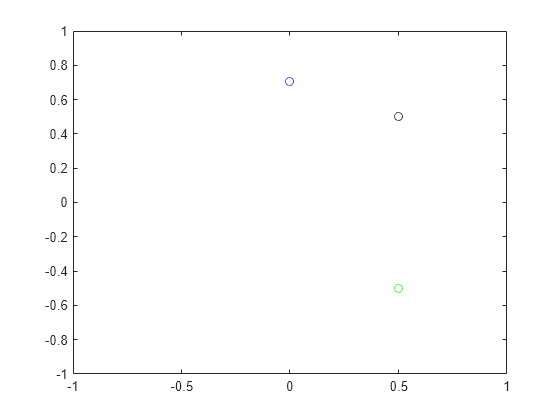
Crea un vector de cuaternión que especifique dos rotaciones separadas, una para rotar el punto 45 y otra para rotar el punto -90 grados alrededor del eje z. Utilice rotatepoint para realizar la rotación.
quat = quaternion([0,0,pi/4; ... 0,0,-pi/2],"euler","XYZ","point"); rotatedPoint = rotatepoint(quat,[x,y,z])
rotatedPoint = 2×3
-0.0000 0.7071 0
0.5000 -0.5000 0
Traza los puntos rotados.
plot(rotatedPoint(1,1),rotatedPoint(1,2),"bo") plot(rotatedPoint(2,1),rotatedPoint(2,2),"go")
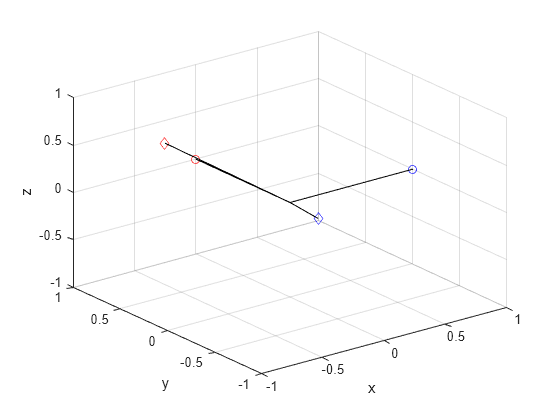
Defina dos puntos en un espacio tridimensional. Define un cuaternión para rotar el punto girando primero sobre el eje z 30 grados y luego sobre el nuevo eje y 45 grados.
a = [1,0,0]; b = [0,1,0]; quat = quaternion([30,45,0],"eulerd","ZYX","point");
Utilice rotatepoint para rotar ambos puntos utilizando el operador de rotación de cuaternión. Muestra el resultado.
rP = rotatepoint(quat,[a;b])
rP = 2×3
0.6124 0.5000 -0.6124
-0.3536 0.8660 0.3536
Visualice la orientación original y la orientación rotada de los puntos. Dibuja líneas desde el origen hasta cada uno de los puntos para fines de visualización.
plot3(a(1),a(2),a(3),"bo"); hold on grid on axis([-1 1 -1 1 -1 1]) xlabel("x") ylabel("y") zlabel("z") plot3(b(1),b(2),b(3),"ro") plot3(rP(1,1),rP(1,2),rP(1,3),"bd") plot3(rP(2,1),rP(2,2),rP(2,3),"rd") plot3([0;rP(1,1)],[0;rP(1,2)],[0;rP(1,3)],"k") plot3([0;rP(2,1)],[0;rP(2,2)],[0;rP(2,3)],"k") plot3([0;a(1)],[0;a(2)],[0;a(3)],"k") plot3([0;b(1)],[0;b(2)],[0;b(3)],"k")
Argumentos de entrada
Argumentos de salida
Algoritmos
La rotación del punto cuaternión gira un punto especificado en R3 según un cuaternión especificado:
donde q es el cuaternión, * representa la conjugación y u es el punto a rotar, especificado como un cuaternión.
Para mayor comodidad, la función rotatepoint toma un punto en R3 y devuelve un punto en R3. Dada una llamada de función con un cuaternión arbitrario, q = a + bi + cj + dk, y una coordenada arbitraria, [x,y,z], por ejemplo,
rereferencedPoint = rotatepoint(q,[x,y,z])
rotatepoint realiza las siguientes operaciones:
Convierte el punto [x,y,z] en un cuaternión:
Normaliza el cuaternión, q:
Aplica la rotación:
Convierte la salida del cuaternión, vq, de nuevo a R3
Capacidades ampliadas
Historial de versiones
Introducido en R2019b