addFrame
Agregue un par de imágenes de color y profundidad al objeto SLAM visual estéreo
Desde R2025a
Descripción
addFrame( agrega el par de imágenes estéreo RGB o en escala de grises, vslam,I1,I2)I1 y I2, al objeto visual estéreo SLAM vslam.
Nota
El objeto stereovslam se ejecuta en varios subprocesos internamente, lo que puede retrasar el procesamiento de un cuadro de imagen agregado mediante la función addFrame. Además, el objeto que se ejecuta en varios subprocesos significa que el cuadro actual que el objeto está procesando puede ser diferente del cuadro agregado recientemente.
addFrame(___,DisparityMap=Value) establece el mapa de disparidad para las imágenes de entrada estéreo I1 y I2. El mapa de disparidad debe ser una matriz simple o doble y tener el mismo ancho y alto que las imágenes de entrada. Si no se especifica, la función calcula de manera predeterminada la disparidad de cuadros utilizando coincidencia de bloques semiglobales.
Ejemplos
Realice la localización y el mapeo visual simultáneo estereoscópico (vSLAM) utilizando los datos del Conjunto de datos de localización y mapeo a largo plazo UTIAS proporcionado por el Instituto de Estudios Aeroespaciales de la Universidad de Toronto. Puede descargar los datos a un directorio mediante un navegador web o ejecutando este código:
ftpObj = ftp("asrl3.utias.utoronto.ca"); tempFolder = fullfile(tempdir); dataFolder = [tempFolder,'2020-vtr-dataset\UTIAS-In-The-Dark\']; zipFileName = [dataFolder,'run_000005.zip']; folderExists = exist(dataFolder,"dir");
Crea una carpeta en un directorio temporal para guardar el archivo descargado y extraer su contenido.
if ~folderExists mkdir(dataFolder) disp("Downloading run_000005.zip (818 MB). This download can take a few minutes.") mget(ftpObj,"/2020-vtr-dataset/UTIAS-In-The-Dark/run_000005.zip",tempFolder); disp("Extracting run_000005.zip (818 MB) ...") unzip(zipFileName,dataFolder); end
Crea dos objetos imageDatastore para almacenar las imágenes estéreo.
imgFolderLeft = [dataFolder,'\images\left\']; imgFolderRight = [dataFolder,'\images\right\']; imdsLeft = imageDatastore(imgFolderLeft); imdsRight = imageDatastore(imgFolderRight);
Especifique los parámetros intrínsecos y la línea base de la cámara estéreo, y utilícelos para crear un objeto SLAM visual estéreo. La distancia focal, el punto principal y el tamaño de la imagen están en píxeles, y la línea de base está en metros.
focalLength = [387.777 387.777];
principalPoint = [257.446 197.718];
imageSize = [384 512];
intrinsics = cameraIntrinsics(focalLength,principalPoint,imageSize);
baseline = 0.239965;
vslam = stereovslam(intrinsics,baseline,MaxNumPoints=600, ...
TrackFeatureRange=[30 120],SkipMaxFrames=5);Procese cada par de imágenes estéreo y visualice las poses de la cámara y los puntos del mapa 3D.
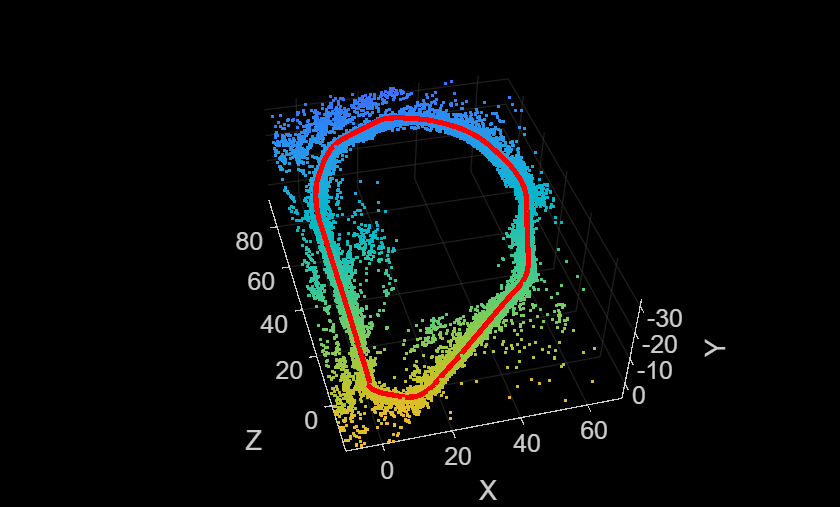
for i = 1:numel(imdsLeft.Files) leftImage = readimage(imdsLeft,i); rightImage = readimage(imdsRight,i); addFrame(vslam,leftImage,rightImage); if hasNewKeyFrame(vslam) % Query 3-D map points and camera poses xyzPoints = mapPoints(vslam); [camPoses,viewIds] = poses(vslam); % Display 3-D map points and camera trajectory plot(vslam); end % Get current status of system status = checkStatus(vslam); % Stop adding frames when tracking is lost if status == uint8(0) break end end
Una vez procesados todos los fotogramas, reinicie el sistema.
while ~isDone(vslam) plot(vslam) end
reset(vslam)
Argumentos de entrada
Historial de versiones
Introducido en R2025aConsulte también
Objetos
Funciones
checkStatus|hasNewKeyFrame|isDone|mapPoints|plot|poses|reset