mapPoints
Construya un mapa 3D de puntos del mundo a partir de un objeto vSLAM estéreo
Desde R2025a
Sintaxis
Descripción
Ejemplos
Realice la localización y el mapeo visual simultáneo estereoscópico (vSLAM) utilizando los datos del Conjunto de datos de localización y mapeo a largo plazo UTIAS proporcionado por el Instituto de Estudios Aeroespaciales de la Universidad de Toronto. Puede descargar los datos a un directorio mediante un navegador web o ejecutando este código:
ftpObj = ftp("asrl3.utias.utoronto.ca"); tempFolder = fullfile(tempdir); dataFolder = [tempFolder,'2020-vtr-dataset\UTIAS-In-The-Dark\']; zipFileName = [dataFolder,'run_000005.zip']; folderExists = exist(dataFolder,"dir");
Crea una carpeta en un directorio temporal para guardar el archivo descargado y extraer su contenido.
if ~folderExists mkdir(dataFolder) disp("Downloading run_000005.zip (818 MB). This download can take a few minutes.") mget(ftpObj,"/2020-vtr-dataset/UTIAS-In-The-Dark/run_000005.zip",tempFolder); disp("Extracting run_000005.zip (818 MB) ...") unzip(zipFileName,dataFolder); end
Crea dos objetos imageDatastore para almacenar las imágenes estéreo.
imgFolderLeft = [dataFolder,'\images\left\']; imgFolderRight = [dataFolder,'\images\right\']; imdsLeft = imageDatastore(imgFolderLeft); imdsRight = imageDatastore(imgFolderRight);
Especifique los parámetros intrínsecos y la línea base de la cámara estéreo, y utilícelos para crear un objeto SLAM visual estéreo. La distancia focal, el punto principal y el tamaño de la imagen están en píxeles, y la línea de base está en metros.
focalLength = [387.777 387.777];
principalPoint = [257.446 197.718];
imageSize = [384 512];
intrinsics = cameraIntrinsics(focalLength,principalPoint,imageSize);
baseline = 0.239965;
vslam = stereovslam(intrinsics,baseline,MaxNumPoints=600, ...
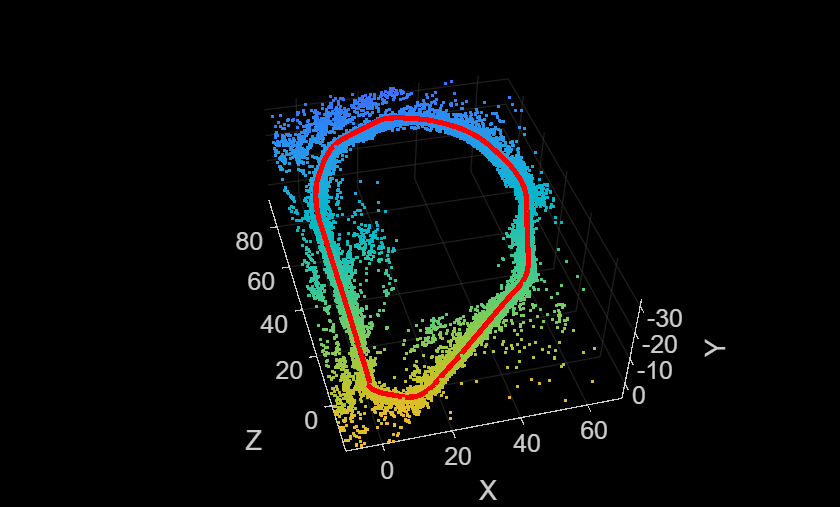
TrackFeatureRange=[30 120],SkipMaxFrames=5);Procese cada par de imágenes estéreo y visualice las poses de la cámara y los puntos del mapa 3D.
for i = 1:numel(imdsLeft.Files) leftImage = readimage(imdsLeft,i); rightImage = readimage(imdsRight,i); addFrame(vslam,leftImage,rightImage); if hasNewKeyFrame(vslam) % Query 3-D map points and camera poses xyzPoints = mapPoints(vslam); [camPoses,viewIds] = poses(vslam); % Display 3-D map points and camera trajectory plot(vslam); end % Get current status of system status = checkStatus(vslam); % Stop adding frames when tracking is lost if status == uint8(0) break end end
Una vez procesados todos los fotogramas, reinicie el sistema.
while ~isDone(vslam) plot(vslam) end
reset(vslam)
Argumentos de entrada
Argumentos de salida
Historial de versiones
Introducido en R2025a
Consulte también
Objetos
Funciones
addFrame|checkStatus|hasNewKeyFrame|isDone|plot|poses|reset