Genere lecturas IMU en un péndulo doble
Este ejemplo muestra cómo generar lecturas de unidades de medida inercial (IMU) a partir de dos sensores IMU montados en los enlaces de un péndulo doble. El péndulo doble se modela utilizando Simscape™ Multibody ™. Para ver un ejemplo paso a paso de cómo construir un péndulo simple usando Simscape Multibody, consulte Model a Simple Pendulum (Simscape Multibody).
open_system("doublePendulumIMU.slx");Modelo

El marco de referencia inercial (o marco mundial) en Simscape Multibody tiene como valor predeterminado el marco de coordenadas cartesianas del lado derecho. Las articulaciones revolutivas solo aplican rotaciones alrededor del eje I del marco de referencia del cuerpo. Al principio, el sistema inercial y el sistema de referencia corporal están alineados. El bloque Rigid Transform aplica una rotación de -90 grados alrededor del eje X del marco de referencia del cuerpo de modo que el eje Y transformado apunta en la dirección del vector de gravedad y el enlace es libre de girar a lo largo del eje Z transformado.
Utilice los marcos finales de los dos enlaces como marcos de sensores de las IMU simuladas. Cada IMU se define dentro de un subsistema IMU.
Subsistema IMU
Abra el primer subsistema IMU.

Puede elegir que el marco de referencia de las entradas IMU se encuentre en el marco NED (Noreste-Abajo) o ENU (Este-Norte-Arriba). En esta simulación, usted elige el marco ENU que se alinea con el marco de coordenadas derecho. El primer bloque de sensor de transformación mide la relación espacial relativa entre el marco del sensor y el marco inercial. El valor de la aceleración gravitacional se resta de la aceleración total ya que el bloque IMU incorpora la aceleración gravitacional en el marco inercial por defecto. El bloque IMU traduce esta información en datos de sensores de acelerómetro, giroscopio y magnetómetro.
El segundo bloque de sensor de transformación proporciona los datos de medición de ground-truth esperados de la IMU. Mide la relación espacial relativa entre el marco inercial y el marco del sensor medido en el marco del sensor, similar a la IMU. Las aceleraciones se niegan para compensar la negación aplicada a la aceleración en el modelo IMU. Esto se hace en el modelo IMU para obtener lecturas de aceleración total cero cuando el acelerómetro está en caída libre. Consulte imuSensor para obtener más detalles sobre el modelado de IMU.
Simule y visualice datos IMU
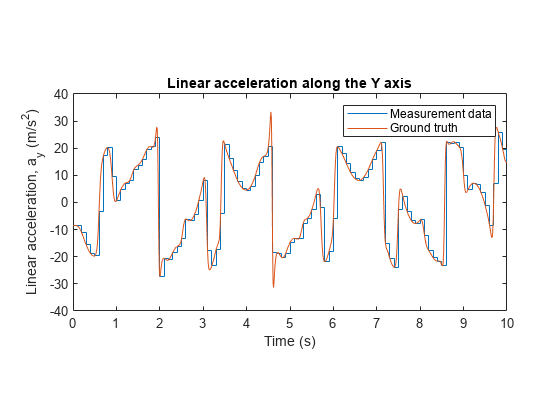
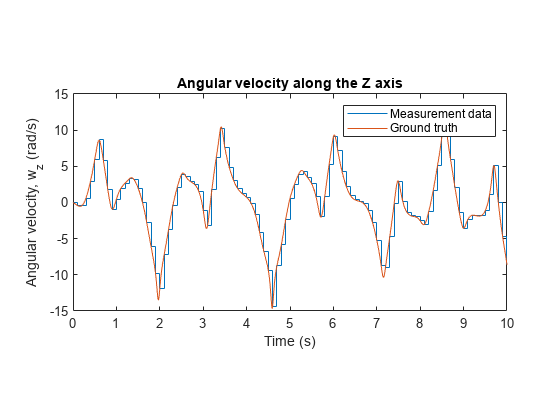
Dado que las rotaciones primarias en el péndulo doble se encuentran a lo largo del eje Z del marco del sensor, las aceleraciones dominantes medidas por la IMU se encuentran a lo largo de los ejes X e Y, y las rotaciones dominantes se encuentran a lo largo del eje Z. Los gráficos a continuación muestran estos datos de IMU simulados de la segunda IMU y comparan los datos con ground-truth.
out = sim("doublePendulumIMU.slx"); % Simulated measurement data for the second IMU wz = out.logsout{4}.Values.wz; ax = out.logsout{4}.Values.ax; ay = out.logsout{4}.Values.ay; % Ground truth for the second IMU wzgt = out.logsout{3}.Values.wz; axgt = out.logsout{3}.Values.ax; aygt = out.logsout{3}.Values.ay; plot(wz); hold on; plot(wzgt); legend("Measurement data","Ground truth"); ylabel("Angular velocity, w_z (rad/s)",Interpreter="tex") xlabel("Time (s)") title("Angular velocity along the Z axis") pbaspect([2 1 1]) hold off;
plot(ax); hold on; plot(axgt); legend("Measurement data","Ground truth"); ylabel("Linear acceleration, a_x (m/s^2)",Interpreter="tex") xlabel("Time (s)") title("Linear acceleration along the X axis") pbaspect([2 1 1]) hold off;

plot(ay); hold on; plot(aygt); legend("Measurement data","Ground truth"); ylabel("Linear acceleration, a_{y} (m/s^{2})",Interpreter="tex") xlabel("Time (s)") title("Linear acceleration along the Y axis") pbaspect([2 1 1]) hold off;