Modelos de sensor
Realice modelado y simulación de sensores para acelerómetros, magnetómetros, giroscopios, altímetros, GPS, IMU y sensores de distancia. Analice las lecturas del sensor, el ruido del sensor, las condiciones ambientales y otros parámetros de configuración. Genera trayectorias para emular estos sensores que viajan a través de un mundo y calibra el rendimiento de sensores.
Para fusionar múltiples sensores o utilizar otros algoritmos de localización, consulte .
Para obtener más información sobre la localización y el posicionamiento GNSS, consulte Posicionamiento GNSS.
Funciones
Bloques
Temas
- Introducción a la simulación de mediciones IMU
Este ejemplo muestra cómo simular mediciones de una unidad de medición inercial (IMU) utilizando el System object ™
imuSensor. - Genere lecturas IMU en un péndulo doble
Este ejemplo muestra cómo generar lecturas de unidades de medida inercial (IMU) a partir de dos sensores IMU montados en los enlaces de un péndulo doble.
- Modelo IMU, GPS e INS/GPS
Combinaciones de modelos de sensores inerciales y GPS
- Análisis de ruido del sensor inercial utilizando la varianza de Allan
Este ejemplo muestra cómo utilizar la varianza de Allan para determinar los parámetros de ruido de un giroscopio MEMS.
- Fuentes de errores del codificador de ruedas
Explore las diversas fuentes de error de los codificadores de ruedas y cómo afectan la estimación de la odometría de las ruedas.
- Eliminar el sesgo de la medición de la velocidad angular
Este ejemplo muestra cómo eliminar el sesgo del giroscopio de una IMU usando
imufilter. - Configurar el objeto de MATLAB Time Scope
Personalice las propiedades de
timescopey utilice herramientas de medición. - Simule lecturas de sensores inerciales desde un escenario de conducción
Genere datos de sensores sintéticos desde IMU, GPS y codificadores de ruedas utilizando herramientas de generación de escenarios de conducción de Automated Driving Toolbox™.
- Simular bloque INS
En este ejemplo, simula un bloque INS utilizando la información de pose de un vehículo que emprende una trayectoria de giro a la izquierda.
Ejemplos destacados
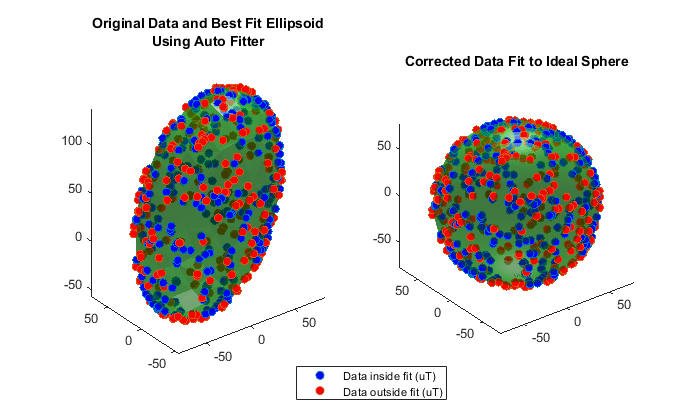
Calibración del magnetómetro
Los magnetómetros detectan la intensidad del campo magnético a lo largo de los ejes X, Y y Z de un sensor. Las mediciones precisas del campo magnético son esenciales para la fusión de sensores y la determinación del rumbo y la orientación.
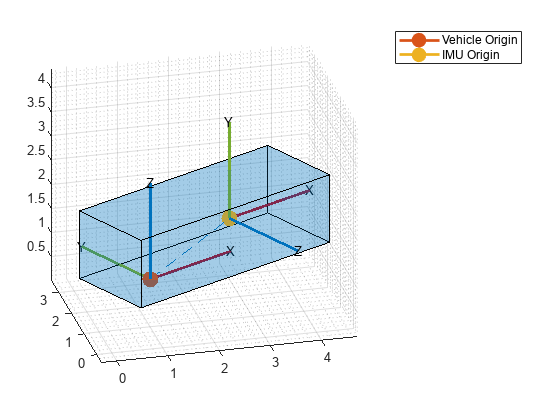
Generar lecturas IMU descentradas
Este ejemplo muestra cómo generar lecturas de unidades de medición inercial (IMU) desde un sensor montado en un vehículo terrestre. Dependiendo de la ubicación del sensor, las aceleraciones de la IMU son diferentes.
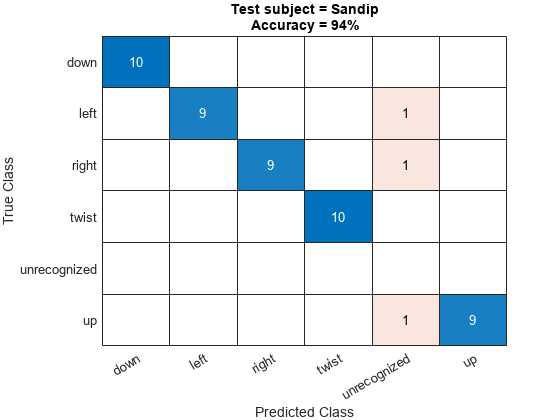
Reconocimiento de gestos mediante unidades de medida inerciales
Este ejemplo muestra cómo reconocer gestos basándose en una unidad de medición inercial (IMU) portátil. El reconocimiento de gestos es un subcampo del campo general de Reconocimiento de actividad humana (HAR). En este ejemplo, se utiliza la agrupación y el alineamiento temporal dinámico de cuaterniones para crear un algoritmo de coincidencia de plantillas para clasificar cinco gestos.

Fusión de sensores IMU con Simulink
Este ejemplo muestra cómo generar y fusionar datos del sensor IMU utilizando Simulink®. Puede modelar con precisión el comportamiento de un acelerómetro, un giroscopio y un magnetómetro y fusionar sus salidas para calcular la orientación.