Suavizado de ruta basado en optimización para vehículos autónomos
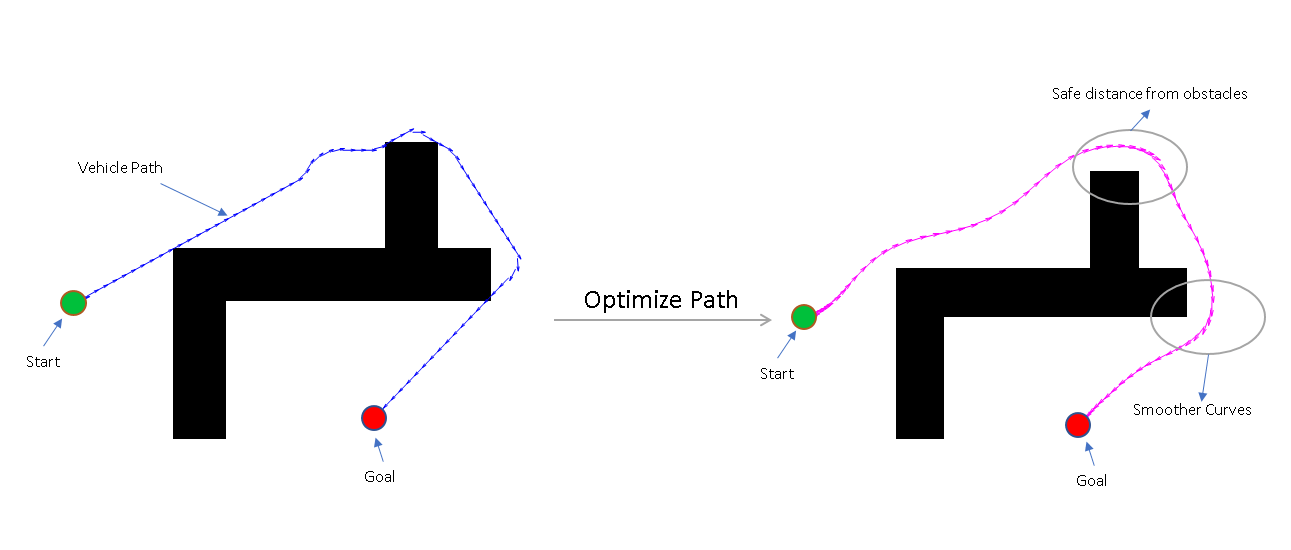
Este ejemplo le muestra cómo optimizar la trayectoria de un robot similar a un automóvil manteniendo una curvatura suave y una distancia segura de los obstáculos en un estacionamiento.
En este ejemplo, puede utilizar la función optimizePath junto con el objeto optimizePathOptions para optimizar una ruta planificada. Puede utilizar cualquier planificador de rutas 2D como plannerRRT, plannerRRTStar, plannerAstar, plannerHybridAStar, etc. para planificar una ruta desde la entrada del estacionamiento hasta el lugar de estacionamiento deseado. En un entorno similar a un estacionamiento, el automóvil a menudo necesita tomar curvas cerradas y evitar obstáculos como otros automóviles, pilares, letreros, etc. Es posible que la ruta generada por los planificadores de rutas no siempre sea seguro, fácil de navegar, fluido o cinemáticamente factible. En tales situaciones, la optimización de la ruta se vuelve esencial. El objeto optimizePathOptions tiene un amplio conjunto de parámetros y pesos que puedes ajustar para tener en cuenta el entorno y las limitaciones del vehículo; los pesos te permiten establecer su importancia relativa mientras optimizas la ruta.
ConfiguraciónAmbiente del estacionamiento
Cree un objeto binaryOccupancyMap a partir de un mapa de estacionamiento y configure la resolución del mapa como 3 celdas/metro.
load("parkingMap.mat");
resolution = 3;
map = binaryOccupancyMap(map,resolution);Visualiza el mapa. El mapa contiene el plano de un aparcamiento con algunas de las plazas ya ocupadas.
show(map)
title("Parking Lot Map")![Figure contains an axes object. The axes object with title Parking Lot Map, xlabel X [meters], ylabel Y [meters] contains an object of type image.](optimizationbasedpathsmoothingexample_02_es.png)
Elija lugar de estacionamiento
La posición actual del automóvil en la entrada del estacionamiento se toma como pose inicial y se elige una plaza de estacionamiento desocupada deseada como pose objetivo del vehículo.
Define las posiciones de inicio y destino del vehículo como vectores [x y theta]. x y y especifican la posición en metros, y theta especifica el ángulo de orientación en radianes.
startPose = [2 9 0]; goalPose = [27 18 pi/2];
Visualiza las poses.
show(map) hold on quiver(startPose(1),startPose(2),cos(startPose(3)),sin(startPose(3)),2,... color=[0 0.75 0.23],LineWidth=2,... Marker="o",MarkerFaceColor=[0 0.75 0.23],MarkerSize=5,... DisplayName="Start Pose",ShowArrowHead="off"); quiver(goalPose(1),goalPose(2),cos(goalPose(3)),sin(goalPose(3)),2, ... color=[1 0 0],LineWidth=2,... Marker='o',MarkerFaceColor=[1 0 0],MarkerSize=5,... DisplayName="Goal Pose",ShowArrowHead="off"); legend(Location="southeast"); title("Start and Goal Poses in Parking Lot Map") hold off
![Figure contains an axes object. The axes object with title Start and Goal Poses in Parking Lot Map, xlabel X [meters], ylabel Y [meters] contains 3 objects of type image, quiver. These objects represent Start Pose, Goal Pose.](optimizationbasedpathsmoothingexample_03_es.png)
Planificación de rutas
Cree un validador de estado validatorOccupancyMap utilizando la definición stateSpaceSE2. Especifique el mapa y la distancia para interpolar y validar segmentos de ruta.
validator = validatorOccupancyMap(stateSpaceSE2,map=map); validator.ValidationDistance = 0.1;
Inicialice el objeto plannerHybridAStar con el objeto validador de estado. Especifique las propiedades MinTurningRadius y MotionPrimitiveLength del planificador.
planner = plannerHybridAStar(validator,MinTurningRadius=3,MotionPrimitiveLength=4);
Establezca un número aleatorio predeterminado para la repetibilidad.
rng("default");Planifica una ruta desde la pose inicial hasta la pose objetivo.
refPath = plan(planner,startPose,goalPose); path = refPath.States;
Visualice la ruta planificada.
show(planner,Tree="off"); legend(Location="southeast"); hold off
![Figure contains an axes object. The axes object with title Hybrid A* Path Planner, xlabel X [meters], ylabel Y [meters] contains 7 objects of type image, line, scatter. These objects represent Forward Path, Reverse Path, Path Points, Orientation, Start, Goal.](optimizationbasedpathsmoothingexample_04_es.png)
Visualice la orientación del vehículo.
plot(rad2deg(refPath.States(:,3)));
title("Orientation of Vehicle Along the Path in degrees")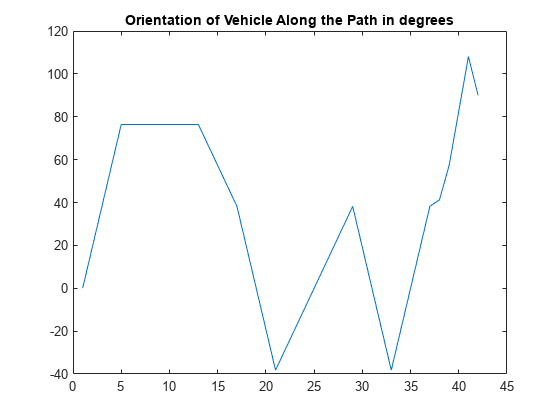
Configurar los parámetros de optimización de ruta
La ruta generada por el planificador se compone de segmentos de ruta continuos, pero los cruces pueden ser discontinuos. Estos cruces pueden provocar cambios bruscos en el ángulo de dirección. La ruta también puede contener segmentos que añaden tiempo de conducción adicional. Para evitar dicho movimiento, es necesario optimizar y suavizar la ruta. Las rutas a veces están muy cerca de los obstáculos, lo que puede ser riesgoso, especialmente para vehículos pesados como camiones.
Crear opciones de optimización
Cree un objeto optimizePathOptions para configurar el comportamiento de la función optimizePath y la ruta resultante de éste.
options = optimizePathOptions
options =
optimizePathOptions
Trajectory Parameters
MaxPathStates: 200
ReferenceDeltaTime: 0.3000
MinTurningRadius: 1
MaxVelocity: 0.4000
MaxAngularVelocity: 0.3000
MaxAcceleration: 0.5000
MaxAngularAcceleration: 0.5000
Obstacle Parameters
ObstacleSafetyMargin: 0.5000
ObstacleCutOffDistance: 2.5000
ObstacleInclusionDistance: 0.7500
Solver Parameters
NumIteration: 4
MaxSolverIteration: 15
Weights
WeightTime: 10
WeightSmoothness: 1000
WeightMinTurningRadius: 10
WeightVelocity: 100
WeightAngularVelocity: 10
WeightAcceleration: 10
WeightAngularAcceleration: 10
WeightObstacles: 50
Las opciones de optimización se agrupan en cuatro categorías:
Parámetros de trayectoria
Parámetros de obstáculos
Parámetros del solver
Pesos
Parámetros de trayectoria
Los parámetros de trayectoria se utilizan para especificar las restricciones del vehículo mientras se mueve a lo largo de la ruta, como la velocidad, la aceleración, el radio de giro, etc. Son límites suaves, lo que significa que el solver puede cambiarlos ligeramente mientras optimiza la ruta. Ajuste los siguientes parámetros,
MinTurningRadius- El radio de giro del vehículo. AumentarMinTurningRadiusdará lugar a curvaturas de trayectoria mayores.MaxVelocity- La velocidad máxima que puede alcanzar el vehículo. Cambiar esto modificaría la velocidad del vehículo y el tiempo de trayectoria.MaxAcceleration- La aceleración máxima posible para el vehículo.ReferenceDeltaTime- Tiempo de recorrido entre dos poses consecutivas. Aumentar esto aumentaría la velocidad del vehículo.MaxPathStates- Número máximo de poses permitidas en la ruta. Aumentar esto puede dar una trayectoria más suave pero también podría aumentar el tiempo de optimización.
options.MinTurningRadius = 3; % meters options.MaxVelocity = 5; % m/s options.MaxAcceleration = 1; % m/s/s options.ReferenceDeltaTime = 0.1; % second separationBetweenStates = 0.2; % meters numStates = refPath.pathLength/separationBetweenStates; options.MaxPathStates = round(numStates);
Parámetros de obstáculos
Los parámetros de obstáculos especifican la influencia de los obstáculos en la ruta. Si existe la posibilidad de que los obstáculos se muevan o no se conocen con precisión sus dimensiones, entonces debe mantener el margen de seguridad más alto. En este ejemplo, dado que la mayoría de los obstáculos son marcas de carril y vehículos estacionados, el margen de seguridad puede ser menor. Ajuste los siguientes parámetros,
ObstacleSafetyMargin- El margen de seguridad que debe mantener el camino respecto de los obstáculos. Aumentar el margen de seguridad hará que la ruta sea más seguro y aumentará la distancia desde los obstáculos.ObstacleInclusionDistance- Los obstáculos dentro de esta distancia de la ruta se incluirán para la optimización.ObstacleCutOffDistance- Los obstáculos más allá de esta distancia de la ruta se ignorarán durante la optimización. Este valor siempre debe ser mayor que la distancia de inclusión del obstáculo.
Para los obstáculos entre ObstacleInclusionDistance y ObstacleCutOffDistance se consideran los obstáculos más cercanos en los lados izquierdo y derecho entre la distancia de inclusión y la distancia de corte.
options.ObstacleSafetyMargin = 2; % meters options.ObstacleInclusionDistance = 0.75; % meters options.ObstacleCutOffDistance = 2.5; %i meters
Parámetros del solver
Los parámetros del solver especifican las opciones del solver utilizado al optimizar la ruta. Los valores más altos de estos parámetros mejoran los resultados de optimización pero también afectan el tiempo de optimización, por lo que deben ajustarse según la necesidad. Ajuste los siguientes parámetros,
NumIteration- Número de veces que se invoca el solucionador durante la optimización; antes de cada invocación, el número de poses en la ruta se ajusta en función del tiempo delta de referencia.MaxSolverIteration- Número máximo de iteraciones por invocación del solucionador.
Si la ruta ya es densa, se puede reducir NumIteration y aumentar MaxSolverIteration. Si la ruta es dispersa, entonces NumIteration puede ser más alto y MaxSolverIteration puede mantenerse más bajo.
options.NumIteration = 4; options.MaxSolverIteration = 15;
Pesos
Los pesos definen la importancia relativa de varias restricciones discutidas anteriormente. Dado que la mayoría de las restricciones son límites suaves, los pesos deciden qué tan importante es una restricción al optimizar la ruta. Ajustelos siguientes pesos,
WeightTime- Peso del componente de tiempo, aumentarlo conduciría a un tiempo de recorrido y una ruta más cortos.WeightSmoothness- Aumentar este peso hará que la ruta sea más suave.WeightMinTurningRadius- Aumentar esto intentará mantener el radio de giro mayor que el valor mínimo durante la mayor parte de la ruta.WeightVelocity- Aumentar esto garantizará que las restricciones de velocidad se cumplan más de cerca.WeightObstacles- Aumentar esto garantizará que el vehículo no cruce un obstáculo.
options.WeightTime = 10; options.WeightSmoothness = 1000; options.WeightMinTurningRadius = 10; options.WeightVelocity = 10; options.WeightObstacles = 50;
Optimización de ruta
Utilice la función optimizePath para optimizar la ruta generada por el planificador según las opciones de optimización definidas anteriormente.
[optimizedPath,kineticInfo] = optimizePath(path,map,options); drivingDir = sign(kineticInfo.Velocity);
Visualice la ruta optimizada.
show(planner,Tree="off"); hold on forwardMotion = optimizedPath(drivingDir==1,:); reverseMotion = optimizedPath(drivingDir==-1,:); quiver(forwardMotion(:,1),forwardMotion(:,2),cos(forwardMotion(:,3)),sin(forwardMotion(:,3)),... 0.1,Color=[0 0.45 0.74],LineWidth=1,DisplayName="Optimized Forward Path"); quiver(reverseMotion(:,1),reverseMotion(:,2),cos(reverseMotion(:,3)),sin(reverseMotion(:,3)),... 0.1,Color=[0.47 0.68 0.19],LineWidth=1,DisplayName="Optimized Reverse Path"); legend(Location="southeast"); title("Planned Path and Optimized Path") hold off
![Figure contains an axes object. The axes object with title Planned Path and Optimized Path, xlabel X [meters], ylabel Y [meters] contains 9 objects of type image, line, scatter, quiver. These objects represent Forward Path, Reverse Path, Path Points, Orientation, Start, Goal, Optimized Forward Path, Optimized Reverse Path.](optimizationbasedpathsmoothingexample_06_es.png)
Trazar la orientación del vehículo a lo largo de la ruta optimizada.
plot(rad2deg(optimizedPath(:,3)))
title("Orientation of Vehicle Along the Optimized Path in degrees")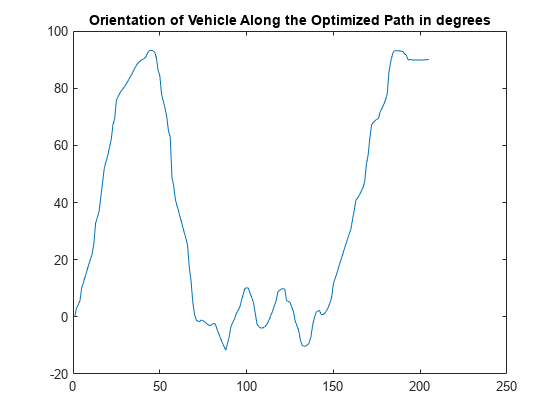
Ajustar parámetros con controles en vivo
En la sección anterior, la ruta se optimizó en función de algunos valores de parámetros preestablecidos. Sin embargo, establecer un buen conjunto de parámetros puede tener un impacto significativo en la ruta.
En esta sección puedes actualizar los parámetros usando los controles deslizantes y visualizar el impacto que tienen en la ruta optimizada. Esto le ayudará a comprender mejor cómo los parámetros afectan la ruta final suave.
Parámetros de trayectoria
options.MinTurningRadius =1.5; % m options.MaxVelocity =
5; % m/s options.MaxAcceleration =
1; % m/s/s
ReferenceDeltaTime es un parámetro importante y puede tener un gran impacto en los resultados.
options.ReferenceDeltaTime =0.2; % s separationBetweenStates =
0.2; % m numStates = refPath.pathLength/separationBetweenStates; options.MaxPathStates = round(numStates);
Obstacle Parameters
options.ObstacleSafetyMargin =1.5; % m options.ObstacleCutOffDistance =
4; % m options.ObstacleInclusionDistance =
2; % m
Parámetros del solucionador
options.NumIteration =2; options.MaxSolverIteration =
8;
Pesos
options.WeightTime =200; options.WeightSmoothness =
1000; options.WeightMinTurningRadius =
140; options.WeightVelocity =
230; options.WeightObstacles =
320;
Optimizar ruta y visualizar
La nueva ruta optimizada se traza junto con la ruta optimizada y generada previamente. Esto le ayudará a comparar los resultados de la optimización.
Primero trace la ruta original planificada por el planificador y los resultados de la optimización anterior.
show(planner,Tree="off") hold on quiver(forwardMotion(:,1),forwardMotion(:,2),cos(forwardMotion(:,3)),sin(forwardMotion(:,3)),... 0.1,Color=[0 0.45 0.74],LineWidth=1,DisplayName="Previous Optimized Forward Path"); quiver(reverseMotion(:,1),reverseMotion(:,2),cos(reverseMotion(:,3)),sin(reverseMotion(:,3)),... 0.1,Color=[0.47 0.68 0.19],LineWidth=1,DisplayName="Previous Optimized Reverse Path");
Ahora optimice la ruta según el nuevo conjunto de opciones de optimización.
[optimizedPath,kineticInfo] = optimizePath(path,map,options);
Finalmente trace la nueva ruta optimizada.
drivingDir = sign(kineticInfo.Velocity); forwardMotion = optimizedPath(drivingDir==1,:); reverseMotion = optimizedPath(drivingDir==-1,:); quiver(forwardMotion(:,1),forwardMotion(:,2),cos(forwardMotion(:,3)),sin(forwardMotion(:,3)),... 0.1,Color=[0.3 0.75 0.93],LineWidth=1,DisplayName="Optimized Forward Path"); quiver(reverseMotion(:,1),reverseMotion(:,2),cos(reverseMotion(:,3)),sin(reverseMotion(:,3)),... 0.1,Color=[0.85 0.33 0.1],LineWidth=1,DisplayName="Optimized Reverse Path"); legend(Location="southeast"); title("Previous and Updated Optimized Path") hold off
![Figure contains an axes object. The axes object with title Previous and Updated Optimized Path, xlabel X [meters], ylabel Y [meters] contains 11 objects of type image, line, scatter, quiver. These objects represent Forward Path, Reverse Path, Path Points, Orientation, Start, Goal, Previous Optimized Forward Path, Previous Optimized Reverse Path, Optimized Forward Path, Optimized Reverse Path.](optimizationbasedpathsmoothingexample_08_es.png)
Referencia
Rosmann, Christoph, Frank Hoffmann y Torsten Bertram. "Optimización y control de trayectoria cinedinámica para robots similares a automóviles". En la Conferencia internacional IEEE/RSJ de 2017 sobre robots y sistemas inteligentes (IROS), 5681–86. Vancouver, Columbia Británica: IEEE, 2017. https://doi.org/10.1109/IROS.2017.8206458.