Seguimiento de trayectorias para un robot de tracción diferencial
Este ejemplo muestra cómo controlar un robot para que siga la trayectoria deseada utilizando un simulador de robot. El ejemplo utiliza el controlador de seguimiento de trayectorias Pure Pursuit para dirigir un robot simulado a lo largo de una trayectoria predeterminada. La trayectoria deseada es un conjunto de waypoints definido explícitamente o calculado mediante un planificador de trayectorias (consulte Planificación de trayectorias en entornos de diferente complejidad). Se crea el controlador de seguimiento de trayectorias Pure Pursuit para un robot de tracción diferencial, que calcula los comandos de control para seguir una trayectoria determinada. Los comandos de control calculados se usan para dirigir el robot simulado a lo largo de la trayectoria deseada con el fin de seguir la trayectoria basada en el controlador Pure Pursuit.
Definir waypoints
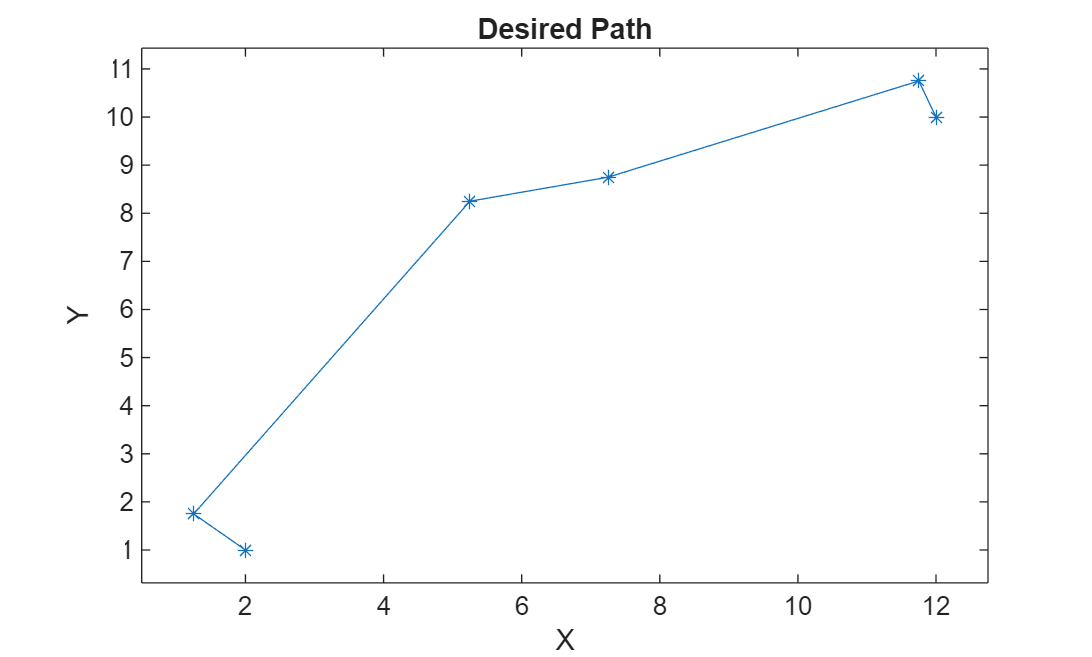
Defina un conjunto de waypoints para la trayectoria que desea que siga el robot.
path = [2.00 1.00;
1.25 1.75;
5.25 8.25;
7.25 8.75;
11.75 10.75;
12.00 10.00];Establezca la ubicación actual y la ubicación objetivo del robot según lo definido en la trayectoria.
robotInitialLocation = path(1,:); robotGoal = path(end,:);
Asuma una orientación inicial del robot (la orientación del robot es el ángulo entre el rumbo del robot y el eje x positivo, medido en el sentido contrario a las agujas del reloj).
initialOrientation = 0;
Defina la pose actual del robot [x y theta].
robotCurrentPose = [robotInitialLocation initialOrientation]';
Crear un modelo cinemático de robot
Inicialice el modelo de robot y asígnele una pose inicial. El robot simulado dispone de ecuaciones cinemáticas para mover un robot de tracción diferencial de dos ruedas. Las entradas a este robot simulado son las velocidades lineales y angulares.
robot = differentialDriveKinematics(TrackWidth=1,VehicleInputs="VehicleSpeedHeadingRate");Visualice la trayectoria deseada.
figure plot(path(:,1),path(:,2),"-*") title("Desired Path") xlabel("X") ylabel("Y") axis padded
Definir el controlador de seguimiento de trayectorias
En función de la trayectoria definida anteriormente y el modelo de movimiento del robot, necesitará un controlador de seguimiento de trayectorias para dirigir el robot a lo largo de la trayectoria. Cree el controlador de seguimiento de trayectorias utilizando el objeto controllerPurePursuit.
controller = controllerPurePursuit;
Utilice la trayectoria definida anteriormente para establecer los waypoints que desea usar para el controlador.
controller.Waypoints = path;
Configure los parámetros del controlador de seguimiento de trayectorias. La velocidad lineal deseada se establece en 0.6 metros/segundo en este ejemplo.
controller.DesiredLinearVelocity = 0.6;
La velocidad angular máxima actúa como límite de saturación para la velocidad de rotación, que en este ejemplo está establecida en 2 radianes/segundo.
controller.MaxAngularVelocity = 2;
En general, la distancia lookahead debe ser mayor que la velocidad lineal deseada para que el robot se desplace por la trayectoria sin problemas. El robot podría tomar un atajo si la distancia lookahead es grande. Por el contrario, una distancia lookahead reducida podría provocar que el robot se comportara de forma inestable al seguir la trayectoria. Para este ejemplo se ha elegido un valor de 0.3 m.
controller.LookaheadDistance = 0.3;
Usar el controlador de seguimiento de trayectorias para dirigir el robot a través de los waypoints deseados
El controlador de seguimiento de trayectorias proporciona señales de control de entrada para el robot, que las utiliza para autodirigirse a lo largo de la trayectoria deseada.
Defina un radio objetivo, que es el umbral de distancia deseado entre la ubicación final del robot y la ubicación objetivo. Una vez que el robot se encuentre a esta distancia del objetivo, se detendrá. Asimismo, debe calcular la distancia real entre la ubicación del robot y la ubicación objetivo. Esta distancia se compara continuamente con el radio objetivo, y el robot se detiene cuando esta distancia es inferior al radio objetivo.
Tenga en cuenta que un valor de radio objetivo demasiado pequeño puede provocar que el robot no alcance el objetivo y muestre un comportamiento inesperado al aproximarse al objetivo.
goalRadius = 0.1; distanceToGoal = norm(robotInitialLocation - robotGoal);
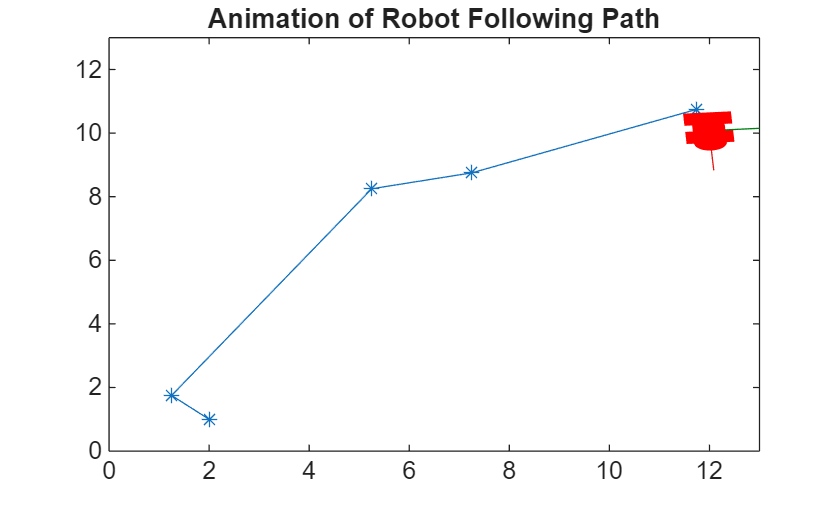
El objeto controllerPurePursuit calcula los comandos de control del robot. Dirija al robot utilizando estos comandos de control hasta que alcance el radio objetivo. Si utiliza un simulador externo o un robot físico, deberá aplicar las salidas del controlador al robot. Es posible que se necesite un sistema de localización para actualizar la pose del robot. El controlador se ejecuta a 10 Hz.
% Initialize the simulation loop sampleTime = 0.1; vizRate = rateControl(1/sampleTime); % Initialize the figure figure % Determine vehicle frame size to most closely represent vehicle with plotTransforms frameSize = robot.TrackWidth/0.8; while(distanceToGoal > goalRadius) % Compute the controller outputs, i.e., the inputs to the robot [v,omega] = controller(robotCurrentPose); % Get the robot's velocity using controller inputs vel = derivative(robot,robotCurrentPose,[v omega]); % Update the current pose robotCurrentPose = robotCurrentPose + vel*sampleTime; % Re-compute the distance to the goal distanceToGoal = norm(robotCurrentPose(1:2) - robotGoal(:)); % Update the plot hold off % Plot path each instance so that it stays persistent while robot mesh % moves plot(path(:,1),path(:,2),"-*") title("Animation of Robot Following Path") hold on % Plot the path of the robot as a set of transforms plotTrVec = [robotCurrentPose(1:2); 0]; plotRot = axang2quat([0 0 1 robotCurrentPose(3)]); plotTransforms(plotTrVec',plotRot, ... MeshFilePath="groundvehicle.stl",Parent=gca,View="2D",FrameSize=frameSize); xlim([0 13]) ylim([0 13]) waitfor(vizRate); end
Uso del controlador de seguimiento de trayectorias con un PRM
Si el conjunto de waypoints deseado se calcula mediante un planificador de trayectorias, el controlador de seguimiento de trayectorias puede utilizarse de forma similar. En primer lugar, visualice el mapa.
load exampleMaps
map = binaryOccupancyMap(simpleMap);
figure
show(map)![Figure contains an axes object. The axes object with title Binary Occupancy Grid, xlabel X [meters], ylabel Y [meters] contains an object of type image.](../../examples/robotics/win64/PathFollowingControllerExample_03.png)
Puede calcular path usando el algoritmo de planificación de trayectorias PRM. Consulte Planificación de trayectorias en entornos de diferente complejidad para obtener más detalles.
mapInflated = copy(map); inflate(mapInflated,robot.TrackWidth/2); prm = robotics.PRM(mapInflated); prm.NumNodes = 100; prm.ConnectionDistance = 10;
Identifique una trayectoria entre la ubicación inicial y la final. Tenga en cuenta que path será diferente debido al carácter probabilístico del algoritmo PRM.
startLocation = [4.0 2.0]; endLocation = [24.0 20.0]; path = findpath(prm,startLocation,endLocation)
path = 8×2
4.0000 2.0000
3.1703 2.7616
7.0797 11.2229
8.1337 13.4835
14.0707 17.3248
16.8068 18.7834
24.4564 20.6514
24.0000 20.0000
Muestre el mapa agrandado, los planes de trayectoria y la trayectoria final.
show(prm);
![Figure contains an axes object. The axes object with title Probabilistic Roadmap, xlabel X [meters], ylabel Y [meters] contains 4 objects of type image, line, scatter.](../../examples/robotics/win64/PathFollowingControllerExample_04.png)
Ya se ha definido un controlador de seguimiento de trayectorias; lo puede reutilizar para calcular los comandos de control de un robot en este mapa. Para reutilizar el controlador y redefinir los waypoints sin modificar el resto de la información, utilice la función release.
release(controller); controller.Waypoints = path;
Establezca la ubicación inicial y el objetivo del robot según lo definido en la trayectoria.
robotInitialLocation = path(1,:); robotGoal = path(end,:);
Asuma una orientación inicial del robot.
initialOrientation = 0;
Defina la pose actual del movimiento del robot [x y theta].
robotCurrentPose = [robotInitialLocation initialOrientation]';
Calcule la distancia a la ubicación objetivo.
distanceToGoal = norm(robotInitialLocation - robotGoal);
Defina un radio objetivo.
goalRadius = 0.1;
Dirija al robot utilizando la salida del controlador en el mapa dado hasta que alcance el objetivo. El controlador se ejecuta a 10 Hz.
reset(vizRate); % Initialize the figure figure while(distanceToGoal > goalRadius) % Compute the controller outputs, i.e., the inputs to the robot [v,omega] = controller(robotCurrentPose); % Get the robot's velocity using controller inputs vel = derivative(robot,robotCurrentPose,[v omega]); % Update the current pose robotCurrentPose = robotCurrentPose + vel*sampleTime; % Re-compute the distance to the goal distanceToGoal = norm(robotCurrentPose(1:2) - robotGoal(:)); % Update the plot hold off show(map); hold on % Plot path each instance so that it stays persistent while robot mesh % moves plot(path(:,1),path(:,2),"-*") % Plot the path of the robot as a set of transforms plotTrVec = [robotCurrentPose(1:2); 0]; plotRot = axang2quat([0 0 1 robotCurrentPose(3)]); plotTransforms(plotTrVec',plotRot,MeshFilePath="groundvehicle.stl",Parent=gca,View="2D",FrameSize=frameSize); light; xlim([0 27]) ylim([0 26]) waitfor(vizRate); end
![Figure contains an axes object. The axes object with title Binary Occupancy Grid, xlabel X [meters], ylabel Y [meters] contains 6 objects of type patch, line, image.](../../examples/robotics/win64/PathFollowingControllerExample_05.png)