arburg
Parámetros de modelos autorregresivos solo de polos: método de Burg
Descripción
Ejemplos
Utilice un vector de coeficientes polinómicos para generar un proceso AR(4) filtrando 1024 muestras de ruido blanco. Reinicie el generador de números aleatorios para obtener resultados reproducibles. Utilice el método de Burg para estimar los coeficientes.
rng default
A = [1 -2.7607 3.8106 -2.6535 0.9238];
y = filter(1,A,0.2*randn(1024,1));
arcoeffs = arburg(y,4)arcoeffs = 1×5
1.0000 -2.7743 3.8408 -2.6843 0.9360
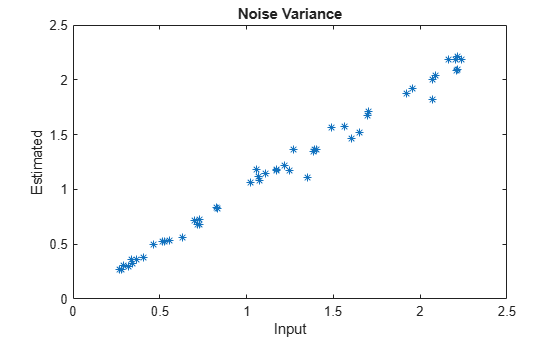
Genere 50 realizaciones del proceso cambiando cada vez la varianza del ruido de entrada. Compare las varianzas estimadas por el método de Burg con los valores reales.
nrealiz = 50; noisestdz = rand(1,nrealiz)+0.5; randnoise = randn(1024,nrealiz); noisevar = zeros(1,nrealiz); for k = 1:nrealiz y = filter(1,A,noisestdz(k) * randnoise(:,k)); [arcoeffs,noisevar(k)] = arburg(y,4); end plot(noisestdz.^2,noisevar,'*') title('Noise Variance') xlabel('Input') ylabel('Estimated')
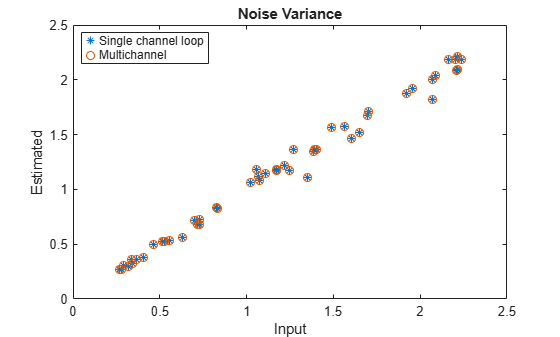
Repita el procedimiento utilizando la sintaxis multicanal de la función.
Y = filter(1,A,noisestdz.*randnoise); [coeffs,variances] = arburg(Y,4); hold on plot(noisestdz.^2,variances,'o') hold off legend('Single channel loop','Multichannel','Location','best')
Argumentos de entrada
Argumentos de salida
Más acerca de
Algoritmos
El método de Burg estima los coeficientes de reflexión y los usa para estimar los parámetros AR de forma recursiva. Podrá encontrar las relaciones de recursión y filtro de malla que describen la actualización de los errores de predicción directa e inversa en [1].
Referencias
[1] Kay, Steven M. Modern Spectral Estimation: Theory and Application. Englewood Cliffs, NJ: Prentice Hall, 1988.
Capacidades ampliadas
Historial de versiones
Introducido antes de R2006a