aryule
Parámetros de modelos autorregresivos solo de polos: método de Yule-Walker
Descripción
Ejemplos
Utilice un vector de coeficientes polinómicos para generar un proceso AR(4) filtrando 1024 muestras de ruido blanco. Reinicie el generador de números aleatorios para obtener resultados reproducibles. Utilice el método de Yule-Walker para estimar los coeficientes.
rng default
A = [1 -2.7607 3.8106 -2.6535 0.9238];
y = filter(1,A,0.2*randn(1024,1));
arcoeffs = aryule(y,4)arcoeffs = 1×5
1.0000 -2.7262 3.7296 -2.5753 0.8927
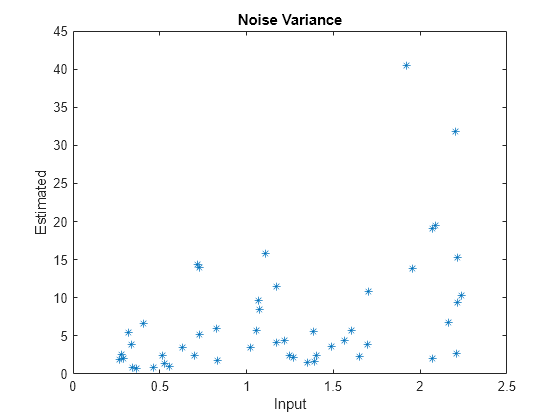
Genere 50 realizaciones del proceso cambiando cada vez la varianza del ruido de entrada. Compare las varianzas estimadas por el método Yule-Walker con los valores reales.
nrealiz = 50; noisestdz = rand(1,nrealiz)+0.5; randnoise = randn(1024,nrealiz); noisevar = zeros(1,nrealiz); for k = 1:nrealiz y = filter(1,A,noisestdz(k) * randnoise(:,k)); [arcoeffs,noisevar(k)] = aryule(y,4); end plot(noisestdz.^2,noisevar,'*') title('Noise Variance') xlabel('Input') ylabel('Estimated')
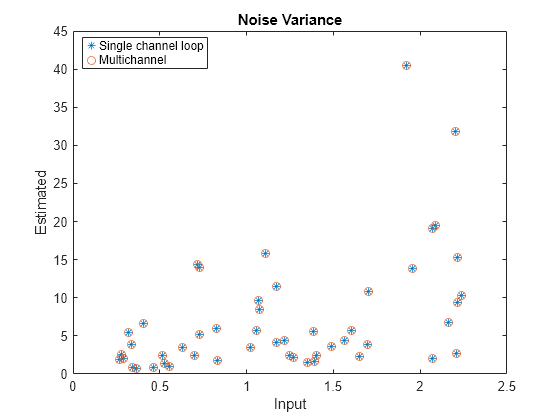
Repita el procedimiento utilizando la sintaxis multicanal de la función.
Y = filter(1,A,noisestdz.*randnoise); [coeffs,variances] = aryule(Y,4); hold on plot(noisestdz.^2,variances,'o') hold off legend('Single channel loop','Multichannel','Location','best')
Utilice un vector de coeficientes polinómicos para generar un proceso AR(2) filtrando 1024 muestras de ruido blanco. Reinicie el generador de números aleatorios para obtener resultados reproducibles.
rng default
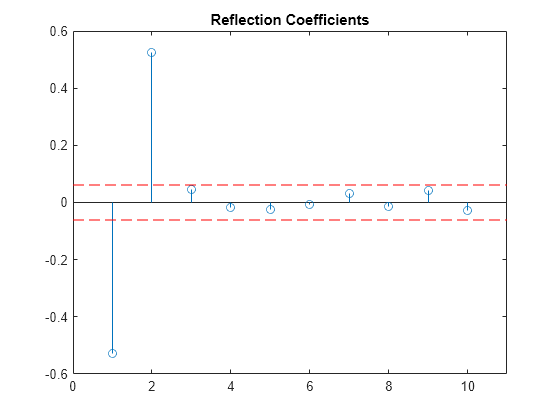
y = filter(1,[1 -0.75 0.5],0.2*randn(1024,1));Utilice el método de Yule-Walker para ajustar un modelo AR(10) al proceso. Obtenga los coeficientes de reflexión como salida y represéntelos. Solo los dos primeros coeficientes se sitúan fuera de los límites de confianza del 95%, lo que indica que un modelo AR(10) sobrestima considerablemente la dependencia temporal de los datos. Para obtener más detalles, consulte AR Order Selection with Partial Autocorrelation Sequence.
[ar,nvar,rc] = aryule(y,10); stem(rc) xlim([0 11]) conf95 = sqrt(2)*erfinv(0.95)/sqrt(1024); [X,Y] = ndgrid(xlim,conf95*[-1 1]); hold on plot(X,Y,'--r') hold off title('Reflection Coefficients')
Argumentos de entrada
Argumentos de salida
Más acerca de
Algoritmos
aryule utiliza la recursión de Levinson-Durbin sobre la estimación sesgada de la secuencia de autocorrelación de muestra para calcular los parámetros.
Referencias
[1] Hayes, Monson H. Statistical Digital Signal Processing and Modeling. New York: John Wiley & Sons, 1996.
Capacidades ampliadas
Historial de versiones
Introducido antes de R2006a