sgolayfilt
Filtrado de Savitzky-Golay
Descripción
Ejemplos
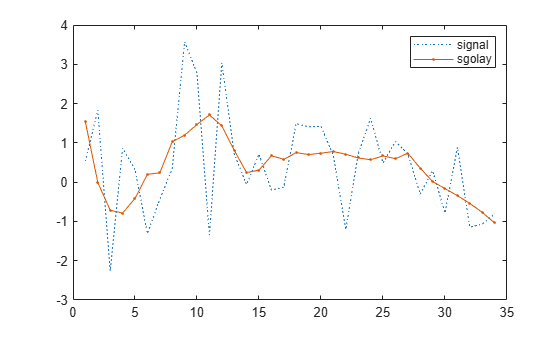
Genere una señal aleatoria y suavícela utilizando sgolayfilt. Especifique un orden polinomial de 3 y una longitud de cuadro de 11. Represente la señal original y la suavizada.
order = 3; framelen = 11; lx = 34; x = randn(lx,1); sgf = sgolayfilt(x,order,framelen); plot(x,':') hold on plot(sgf,'.-') legend('signal','sgolay')
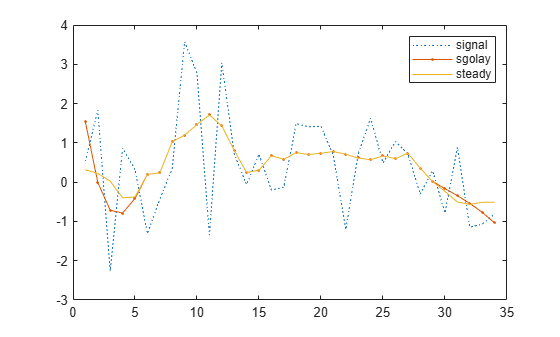
La función sgolayfilt realiza la mayor parte del filtrado convolucionando la señal con la fila central de B, la salida de sgolay. El resultado es la parte de estado estable de la señal filtrada. Genere y represente esta parte.
m = (framelen-1)/2; B = sgolay(order,framelen); steady = conv(x,B(m+1,:),'same'); plot(steady) legend('signal','sgolay','steady')
Las muestras cercanas a los bordes de la señal no se pueden situar en el centro de las ventanas simétricas y se deben tratar de distinta forma.
Para determinar la matriz transitoria de inicio, multiplique las primeras (framelen-1)/2 filas de B por las primeras framelen muestras de la señal.
ybeg = B(1:m,:)*x(1:framelen);
Para determinar la matriz transitoria de fin, multiplique las últimas (framelen-1)/2 filas de B por las últimas framelen muestras de la señal.
yend = B(framelen-m+1:framelen,:)*x(lx-framelen+1:lx);
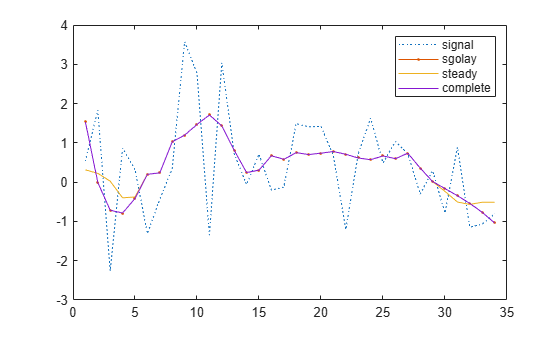
Concatene los transitorios y la parte de estado estable para generar la señal completa.
cmplt = steady; cmplt(1:m) = ybeg; cmplt(lx-m+1:lx) = yend; plot(cmplt) legend('signal','sgolay','steady','complete') hold off
Al añadir pesos a la minimización se rompe la simetría de B y se necesitan pasos adicionales para alcanzar una solución adecuada.
Cargue una señal de voz muestreada a . El archivo contiene una grabación de una voz femenina diciendo la palabra "MATLAB®".
load mtlb
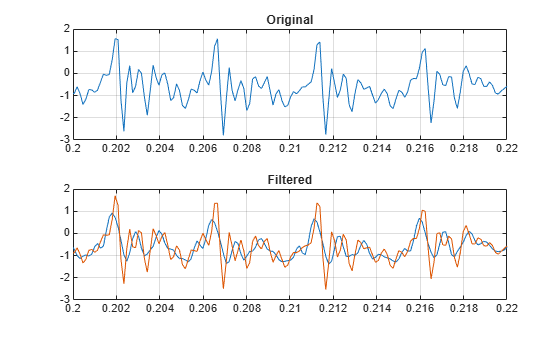
t = (0:length(mtlb)-1)/Fs;Suavice la señal aplicando un filtro de Savitzky-Golay de orden polinomial 9 a cuadros de datos de longitud 21. Represente la señal original y la filtrada. Acérquese a un intervalo de 0,02 segundos.
rd = 9; fl = 21; smtlb = sgolayfilt(mtlb,rd,fl); subplot(2,1,1) plot(t,mtlb) axis([0.2 0.22 -3 2]) title('Original') grid subplot(2,1,2) plot(t,smtlb) axis([0.2 0.22 -3 2]) title('Filtered') grid

Repita el cálculo, pero utilice ahora una ventana de Kaiser como vector de ponderación. Especifique un factor de forma . Represente la nueva señal filtrada.
kmtlb = sgolayfilt(mtlb,rd,fl,kaiser(fl,38)); subplot(2,1,2) hold on plot(t,kmtlb) axis([0.2 0.22 -3 2]) hold off
Argumentos de entrada
Argumentos de salida
Sugerencias
Los filtros de suavizado de Savitzky-Golay suelen utilizarse para "suavizar" señales con ruido cuyo intervalo de frecuencia (sin ruido) es grande. También se denominan filtros polinomiales de suavizado digitales o filtros de suavizado de mínimos cuadrados. Los filtros de Savitzky-Golay funcionan mejor en algunas aplicaciones que los filtros FIR promediadores estándar, que tienden a filtrar el contenido de alta frecuencia junto con el ruido. Los filtros de Savitzky-Golay son más efectivos para mantener los componentes de señal de alta frecuencia, pero menos para rechazar el ruido.
Los filtros de Savitzky-Golay resultan óptimos en cuanto a que minimizan el error de mínimos cuadrados al ajustar polinomios a marcos de datos con ruido. Consulte sgolay para obtener más información sobre el algoritmo de Savitzky-Golay.
Referencias
[1] Orfanidis, Sophocles J. Introduction to Signal Processing. Englewood Cliffs, NJ: Prentice Hall, 1996.
[2] Schafer, Ronald. “What Is a Savitzky-Golay Filter? [Lecture Notes].” IEEE Signal Processing Magazine 28, no. 4 (July 2011): 111–17. https://doi.org/10.1109/MSP.2011.941097.
Capacidades ampliadas
Historial de versiones
Introducido antes de R2006a