Model a State-Space System Using S-Function Builder
In this example, you will use the basic methods in the S-Function Builder block to model a two-input, two-output discrete state-space system with two states. The state-space matrices are parameters to the S-function, and the S-function input and output are vectors.
If you would like to study a manually written version of the created S-function, see
dsfunc.c.
Note that to create a S-function from an example S-Function Builder model, you need to build
the model first.
Configure the S-Function Builder Settings
Specify the number of discrete states and their initial conditions, the sample mode, and
the sample time of the S-function. This example contains two discrete states, each
initialized to 1, and a discrete sample mode with a sample time of
1. Ensure that the Direct feedthrough is
selected, because the current values of the S-function inputs are used to compute its
outputs.

Define Ports and Parameters
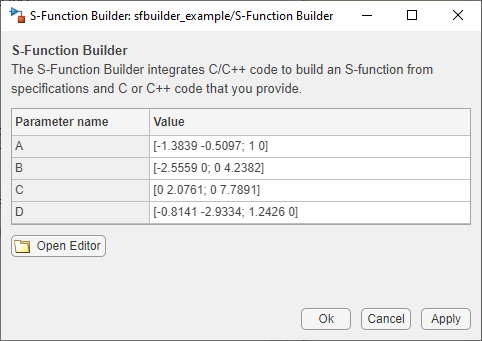
Use the Ports and Parameters table on the bottom of the editor to specify the ports and parameters of the S-function. For this example, we have one input, one output port, and four parameters.
To set or change the values of the block parameters, you can:
Double-click the S-Function Builder block icon in the model.
Use the Block Parameters from the context menu.
Alternatively, you can store the state-space matrices in variables in the MATLAB® workspace and enter the variable names into the Value field for each parameter. Enter the values in the image for state-space parameters on the Value field of the Block Parameters table.
Define the Output Method
In this example, The Outputs_wrapper method calculates the S-function
output as a function of the input and state vectors and the state-space matrices. In the
outputs code, reference S-function parameters using the parameter names defined on the
Ports and Parameters table. Index into 2-D matrices using a scalar
index, again keeping in mind that S-functions use zero-based indexing. For example, to
access the element C(2,1) in the S-function parameter
C, use C[1]in the S-function code.
void dsfunc_builder_Outputs_wrapper(const real_T *u,
real_T *y,
const real_T *xD,
const real_T *xC,
const real_T *A, const int_T p_width0,
const real_T *B, const int_T p_width1,
const real_T *C, const int_T p_width2,
const real_T *D, const int_T p_width3)
{
/* Output_BEGIN */
y[0]=C[0]*xD[0]+C[2]*xD[1]+D[0]*u[0]+D[2]*u[1];
y[1]=C[1]*xD[0]+C[3]*xD[1]+D[1]*u[0]+D[3]*u[1];
/* Output_END */
} |
Define the Update Method
The Update_wrapper method updates the discrete states. As with the
outputs code, use the S-function parameter names and index into 2-D matrices using a scalar
index, keeping in mind that S-functions use zero-based indexing. For example, to access the
element A(2,1) in the S-function parameter A, use
A[1]in the S-function code. The variable xD stores
the final values of the discrete states. Enter the following code in the
Update_wrapper function.
void dsfunc_builder_Update_wrapper(const real_T *u,
real_T *y,
real_T *xD,
const real_T *A, const int_T p_width0,
const real_T *B, const int_T p_width1,
const real_T *C, const int_T p_width2,
const real_T *D, const int_T p_width3)
{
/* Update_BEGIN */
real_T tempX[2] = {0.0, 0.0};
tempX[0]=A[0]*xD[0]+A[2]*xD[1]+B[0]*u[0]+B[2]*u[1];
tempX[1]=A[1]*xD[0]+A[3]*xD[1]+B[1]*u[0]+B[3]*u[1];
xD[0] = tempX[0];
xD[1] = tempX[1];
/* Update_END */
} |
Build the State-Space System
Click the arrow under Build and select the following options:
Show compile steps
Create a debuggable MEX-file
Generate wrapper TLC
To learn more about what each option does, see Build S-Functions Automatically Using S-Function Builder.
To build your S-function, click Build on the toolstrip to create an
executable file for this S-function. You can now run the model and compare the output to the
original discrete state-space S-function contained in sfcndemo_dsfunc.
See Also
Blocks
Functions
Simulink.SFunctionBuilder.setSettings|Simulink.SFunctionBuilder.add|Simulink.SFunctionBuilder.build