LTI System
Utilice un objeto de modelos de sistemas lineales invariantes en el tiempo en Simulink
Bibliotecas:
Control System Toolbox
Descripción
El bloque LTI System importa objetos de modelos de sistemas lineales en el entorno Simulink®. Puede especificar el modelo LTI que desea importar en el parámetro LTI system variable. Puede importar cualquier tipo de modelo de sistema dinámico lineal invariante en el tiempo propio. Si el sistema importado en un modelo en espacio de estados (ss), puede especificar valores de estado iniciales en el parámetro Initial states.
Ejemplos
El modelo LTISystemBlockSimulation muestra cómo usar un bloque LTI System para simular la respuesta de una función de transferencia SISO a una entrada de escalón.
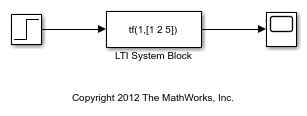
Para especificar un modelo para el bloque LTI System, establezca el parámetro de bloque LTI system variable en:
El nombre de la variable de un modelo LTI en el área de trabajo de MATLAB® o en el área de trabajo del modelo, como
sys.Una expresión de MATLAB que evalúa un modelo LTI, como
tf(1,[1 1]).
Por ejemplo, puede especificar un modelo en espacio de estados (ss), de cero-polo-ganancia (zpk) o de función de transferencia (tf). Puede simular modelos SISO o MIMO, y modelos en tiempo continuo o discreto.
En el modelo LTISystemBlockSimulation, el parámetro LTI system variable es una expresión de MATLAB, tf(1,[1 2 5]), que crea una función de transferencia SISO en tiempo continuo. Si el sistema especificado es un modelo en espacio de estados (ss), puede especificar los valores de estado iniciales al configurar el parámetro Initial states.
Simule el modelo y examine el resultado en el scope.
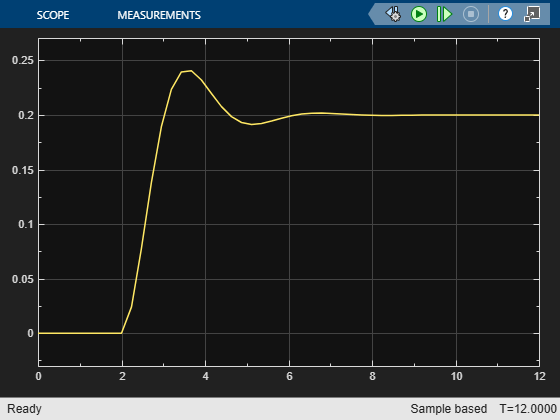
Este ejemplo simula la respuesta del sistema a una entrada de escalón en t = 2 s. Use el bloque LTI System para importar un objeto de modelo LTI en cualquier lugar de su modelo de Simulink y simular la respuesta del sistema lineal a cualquier entrada.
Este modelo muestra cómo usar un bloque LTI System para representar un sistema lineal MIMO en Simulink®.
El bloque LTI System tiene una entrada y una salida, incluso cuando se especifica un modelo MIMO para el bloque. En ese caso, la entrada y la salida del bloque se convierten en señales vectoriales. Por ejemplo, el modelo LTISystemBlockMIMO usa un bloque de sistema LTI para representar una planta MIMO en un sistema de control.
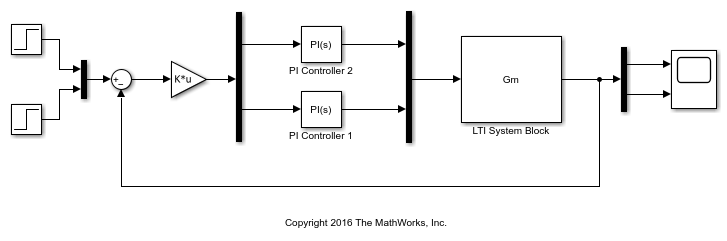
En este modelo, el sistema LTI especificado en el bloque es Gm, un modelo de función de transferencia de 2 salidas y 2 entradas almacenado en el área de trabajo del modelo. El bloque Mux combina las dos salidas del controlador en una señal vectorial para la entrada del bloque LTI System. Del mismo modo, el bloque Demux separa la salida vectorial del bloque LTI System en dos señales escalares.
Simule el modelo y examine el resultado en el scope.
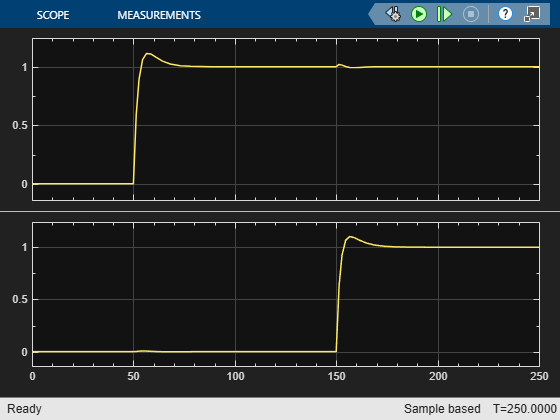
Este ejemplo simula la respuesta de un sistema de lazo cerrado a una unidad de tiempo t = 50 s en la primera entrada y un escalón de t = 150 s en la segunda entrada. Puede usar el bloque LTI System en cualquier lugar en el que desee insertar un sistema LTI en un modelo de Simulink.