ssequiv
Description
ssequiv performs an equivalence transformation on a
state-space model.
| Input Model | Transformed Model |
|---|---|
|
|
|
Here:
The left-transformation matrix is defined as .
The right-transformation matrix is defined as .
e1ande2are either –1 or 1. That is, TL isT1or its inverse and TR isT2or its inverse.
Examples
Perform an equivalence transform for a state space model.
Generate a random state-space model and a transformation matrix.
rng(0) sys = rss(5); T1 = randn(5); rng(2) T2 = randn(5);
Perform the following transformation on sys.
sysT = ssequiv(sys,T1,-1,T2,1);
Plot the frequency response of both models.
bode(sys,'b',sysT,'r--') legend
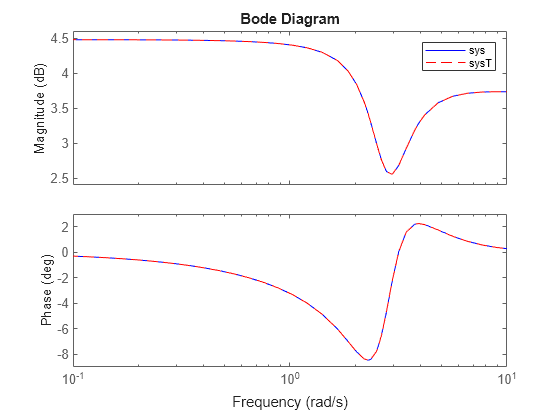
The responses of both models match closely.
ssequiv applies state transformation only to the state vectors of the numeric portion of the generalized model.
Create a genss model.
sys = rss(2,2,2) * tunableSS('a',2,2,3) + tunableGain('b',2,3)
Generalized continuous-time state-space model with 2 outputs, 3 inputs, 4 states, and the following blocks: a: Tunable 2x3 state-space model, 2 states, 1 occurrences. b: Tunable 2x3 gain, 1 occurrences. Model Properties Type "ss(sys)" to see the current value and "sys.Blocks" to interact with the blocks.
Specify transformation matrices.
T1 = [1 -2;3 5]; T2 = T1;
Apply the transformation
.
tsys = ssequiv(sys,T1,1,T2,-1);
Compare this transformed model with the model from decomposed tsys.
sigma(sys,tsys,"r--")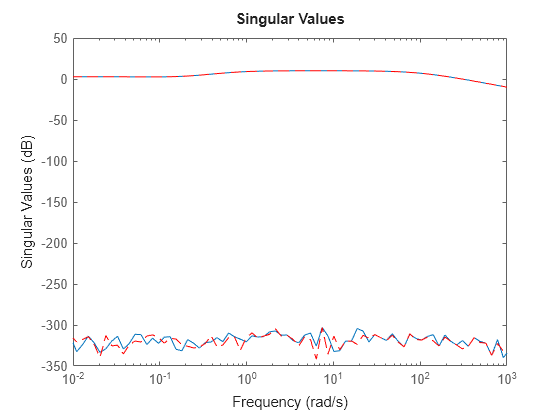
The responses of both models match closely.
Input Arguments
Output Arguments
Version History
Introduced in R2023b