Evaluar los márgenes de ganancia y fase
Este ejemplo muestra cómo examinar el efecto de los márgenes de estabilidad en las características de la respuesta en lazo cerrado de un sistema de control.
Estabilidad de un lazo de retroalimentación
Por lo general, la estabilidad significa que todas las señales internas permanecen acotadas. Es un requisito estándar de los sistemas de control para evitar la pérdida de control y los daños al equipo. En los sistemas de retroalimentación lineales, la estabilidad se puede evaluar observando los polos de la función de transferencia de lazo cerrado. Considere, por ejemplo, el lazo de retroalimentación de SISO:
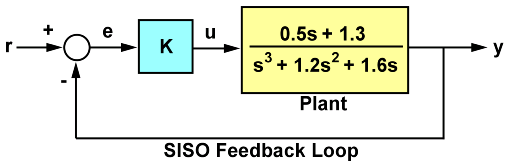
Figura 1: Lazo de retroalimentación de SISO.
En una ganancia de lazo de unidad k, puede calcular la función de transferencia de lazo cerrado T con:
G = tf([.5 1.3],[1 1.2 1.6 0]); T = feedback(G,1);
Para obtener los polos de T, introduzca
pole(T)
ans = -0.2305 + 1.3062i -0.2305 - 1.3062i -0.7389 + 0.0000i
El lazo de retroalimentación para k=1 es estable, ya que todos los polos tienen partes reales negativas.
¿En qué medida es estable?
Comprobar los polos de lazo cerrado proporciona una evaluación binaria de la estabilidad. En la práctica, resulta más útil saber cuán robusta (o frágil) es la estabilidad. Una indicación de robustez es cuánto puede cambiar la ganancia de lazo antes de que se pierda la estabilidad. Puede utilizar el diagrama del lugar de las raíces para estimar el rango de k valores para los que el lazo es estable:
rlocus(G)
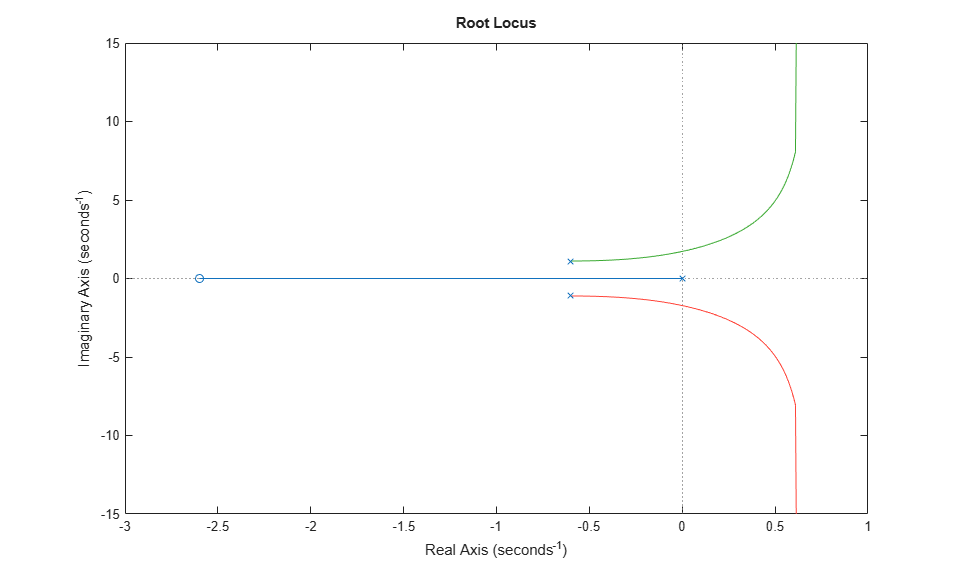
Hacer clic en el punto de intersección entre el lugar y el eje y revela que este lazo de retroalimentación es estable para

Este rango muestra que con k=1, la ganancia de lazo puede aumentar un 270% antes de que pierda estabilidad.
Márgenes de ganancia y fase
Los cambios en la ganancia de lazo suponen solo un aspecto de la estabilidad robusta. En general, el modelado imperfecto de plantas implica que ni la ganancia ni la fase se conocen con exactitud. Dado que los errores de modelado son más perjudiciales cerca de la frecuencia de cruce de ganancias (frecuencia en la que la ganancia de lazo abierto es 0 dB), también es importante cuánta variación de fase puede tolerarse en esta frecuencia.
El margen de fase mide cuánta variación de fase es necesaria para generar una pérdida de estabilidad en la frecuencia de cruce de ganancias. Del mismo modo, el margen de ganancia mide qué variación de ganancia relativa es necesaria para generar una pérdida de estabilidad en la frecuencia de cruce de fases. Juntas, estas dos cifras aportan una estimación del "margen de seguridad" para la estabilidad de lazo cerrado. Cuanto más pequeños son los márgenes de estabilidad, más frágil es la estabilidad.
Puede mostrar los márgenes de ganancia y de fase en un diagrama de Bode de la siguiente forma. En primer lugar, cree el diagrama:
bode(G), grid
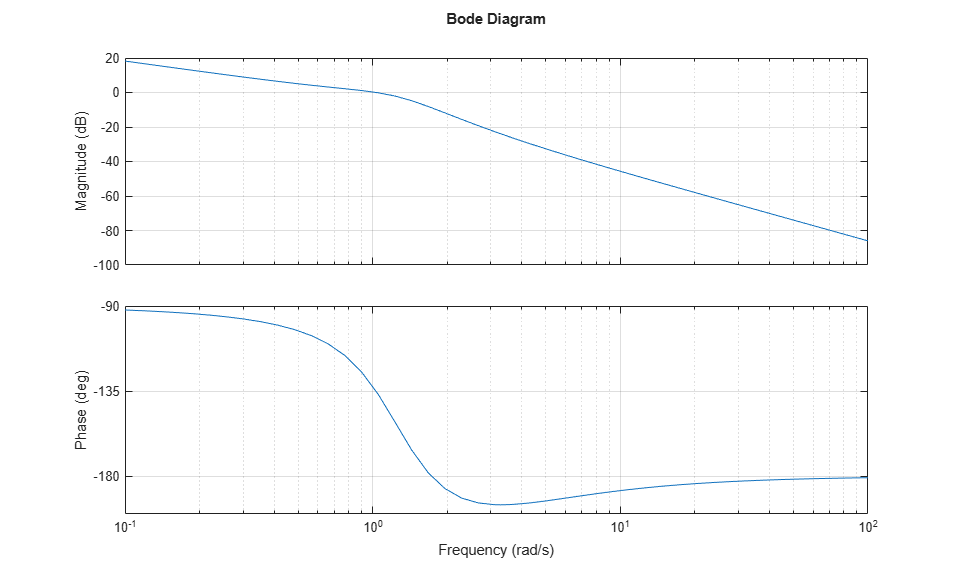
A continuación, haga clic con el botón secundario en el diagrama y seleccione el submenú Characteristics -> Minimum Stability Margins. Por último, haga clic en los marcadores de puntos azules. El diagrama resultante se muestra a continuación:
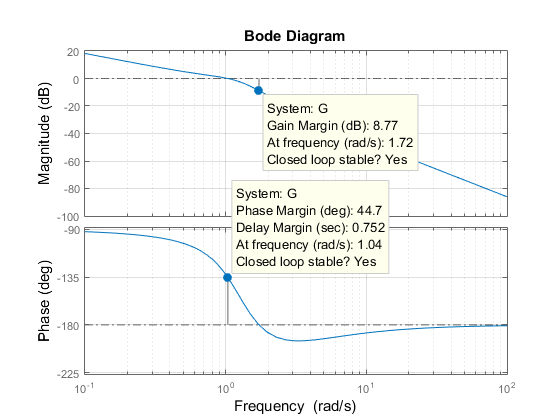
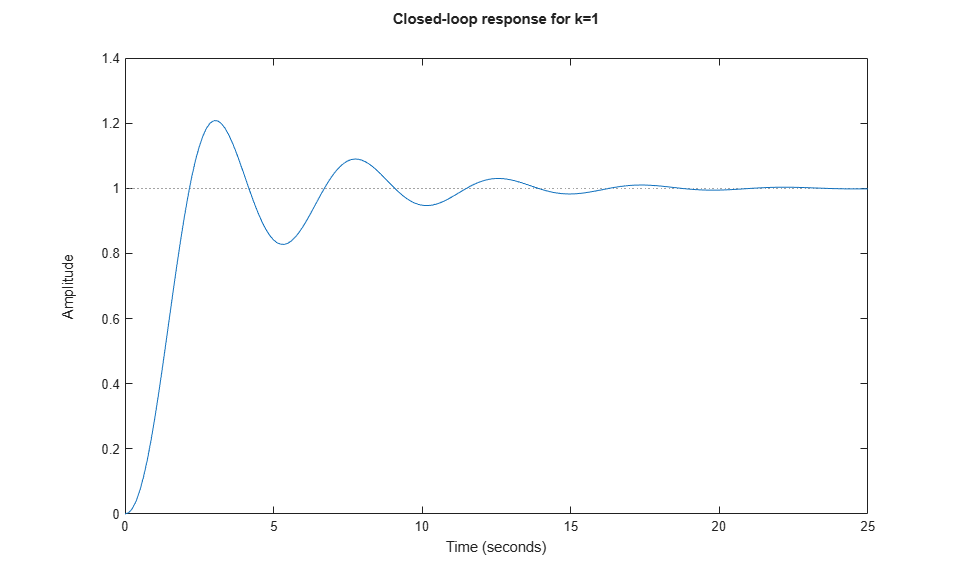
Esto indica un margen de ganancia de aproximadamente 9 dB y un margen de fase de aproximadamente 45 grados. La respuesta al escalón correspondiente en lazo cerrado presenta cerca de un 20% de sobreimpulso y algunas oscilaciones.
step(T), title('Closed-loop response for k=1')
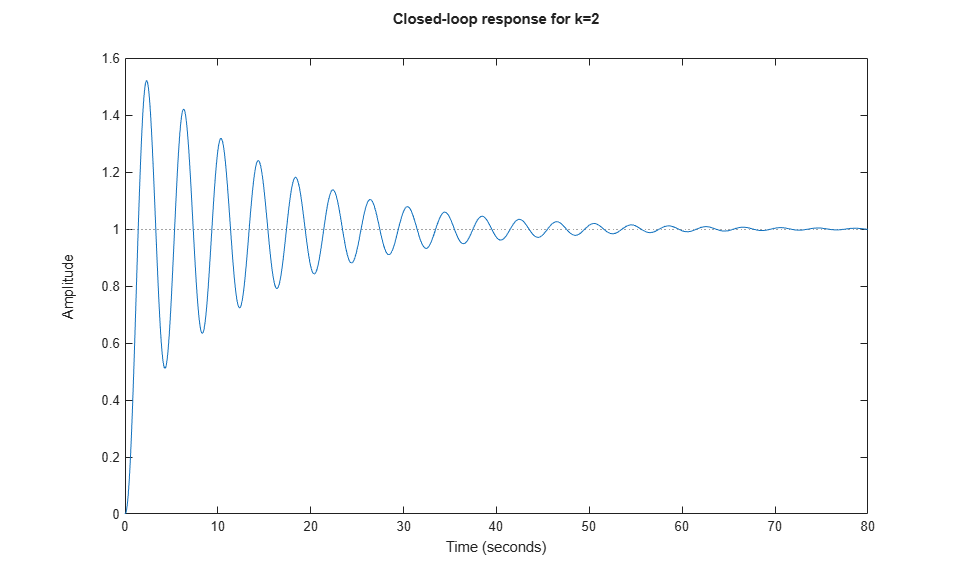
Si se aumenta la ganancia a k=2, los márgenes de estabilidad se reducen a
[Gm,Pm] = margin(2*G); GmdB = 20*log10(Gm) % gain margin in dB Pm % phase margin in degrees
GmdB =
2.7435
Pm =
8.6328
y la respuesta en lazo cerrado presenta oscilaciones con amortiguación deficientes, señal de que está a punto de ser inestable.
step(feedback(2*G,1)), title('Closed-loop response for k=2')
Sistemas con múltiples cruces de ganancias o fases
Algunos sistemas tienen múltiples frecuencias de cruce de ganancias o de cruce de fase, lo que genera múltiples valores de márgenes de ganancia o fase. Por ejemplo, considere el lazo de retroalimentación
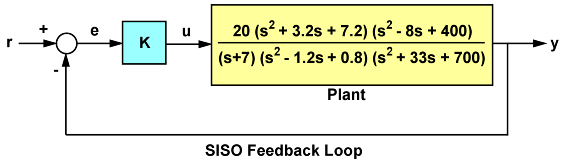
Figura 2: Lazo de retroalimentación con múltiples cruces de fase
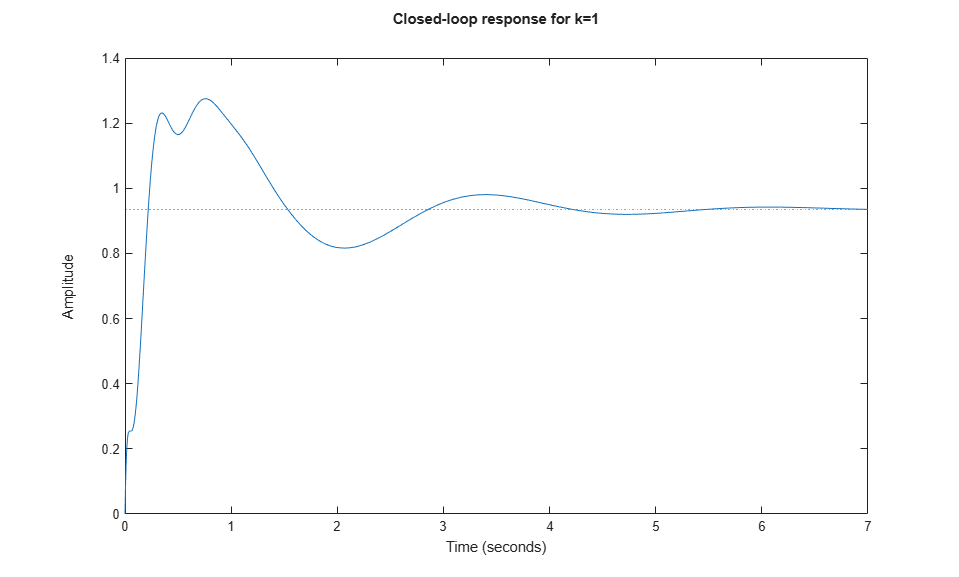
La respuesta en lazo cerrado para k=1 es estable:
G = tf(20,[1 7]) * tf([1 3.2 7.2],[1 -1.2 0.8]) * tf([1 -8 400],[1 33 700]);
T = feedback(G,1);
step(T), title('Closed-loop response for k=1')
Para evaluar la robustez de la estabilidad de este lazo, represente su respuesta de Bode:
bode(G), grid
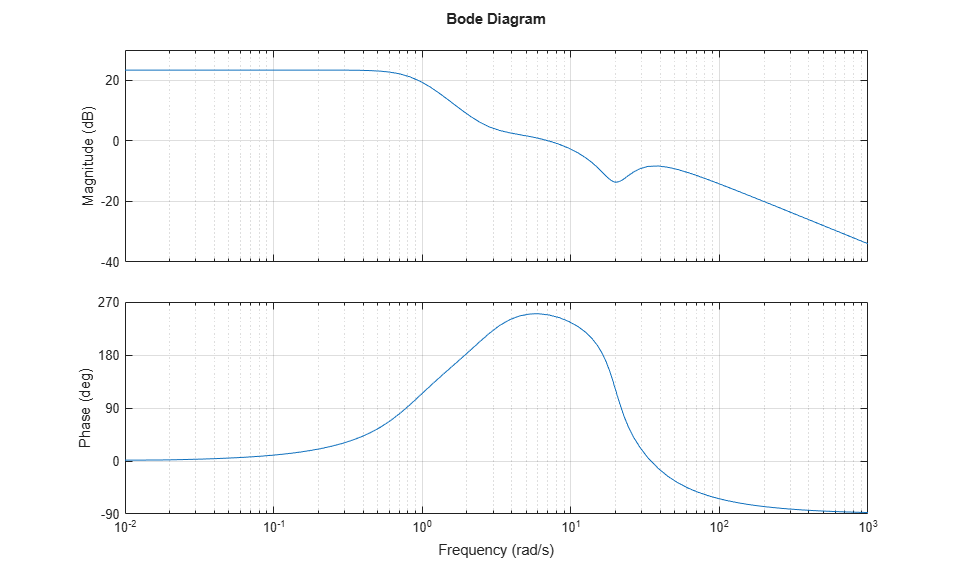
A continuación, haga clic con el botón secundario en el diagrama y seleccione el submenú Characteristics -> All Stability Margins para mostrar todas las frecuencias de cruce y los márgenes de estabilidad asociados. La gráfica resultante se muestra a continuación.
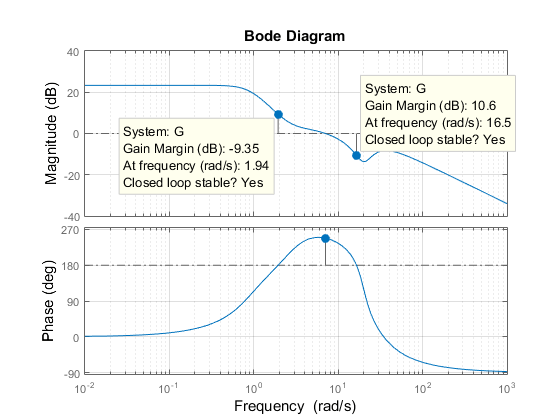
Tenga en cuenta que existen dos cruces de fase de 180 grados con los correspondientes márgenes de ganancia de -9.35 dB y +10.6 dB. Los márgenes de ganancia negativos indican que se pierde estabilidad disminuyendo la ganancia, mientras que los márgenes de ganancia positivos indican que se pierde estabilidad aumentando la ganancia. Esto se confirma representando la respuesta al escalón en lazo cerrado para una variación de la ganancia de más/menos 6 dB alrededor de k=1:
k1 = 2; T1 = feedback(G*k1,1); k2 = 1/2; T2 = feedback(G*k2,1); step(T,'b',T1,'r',T2,'g',12), legend('k = 1','k = 2','k = 0.5')
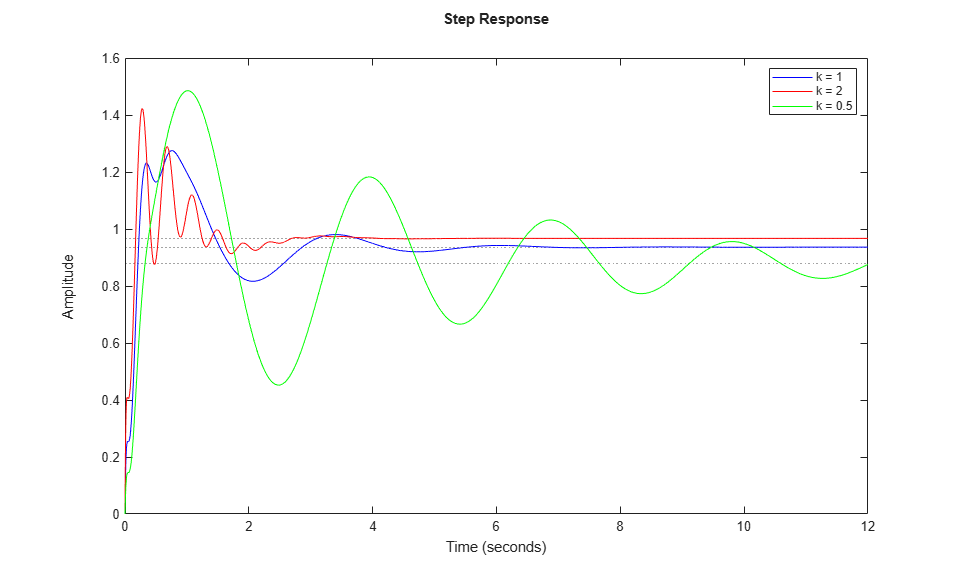
El diagrama muestra oscilaciones incrementadas para los valores de ganancia más pequeños y más grandes.
Puede utilizar el comando allmargin para calcular todos los márgenes de estabilidad. Tenga en cuenta que los márgenes de ganancia se expresan como coeficientes de ganancia y no en dB. Utilice mag2db para convertir los valores a dB.
m = allmargin(G) GainMargins_dB = mag2db(m.GainMargin)
m =
struct with fields:
GainMargin: [0.3408 3.3920]
GMFrequency: [1.9421 16.4807]
PhaseMargin: 68.1140
PMFrequency: 7.0776
DelayMargin: 0.1680
DMFrequency: 7.0776
Stable: 1
GainMargins_dB =
-9.3510 10.6091
Consulte también
margin | pole | diskmargin (Robust Control Toolbox)