smoothTrajectory
Create smooth, jerk-limited actor trajectory in driving scenario
Syntax
Description
The smoothTrajectory function creates a smooth, jerk-limited
trajectory for an actor in a driving scenario based on either the speed values or arrival
times of an actor at each waypoint. The generated trajectory features a smooth transition of
accelerations between waypoints, making it compatible for generating synthetic inertial
navigation system (INS) and global navigation satellite system (GNSS) measurements from an
insSensor
System object™. For more details on how smoothTrajectory generates
trajectories, see Algorithms. By default, the function
creates a trajectory for a vehicle whose steering location is at its rear axle. To create a
trajectory for a vehicle whose steering location is at its front axle, use the
ReferenceSteerPosition name-value argument.
Smoothed Trajectory from Actor Speed Information
smoothTrajectory(___,
specifies options using one or more name-value arguments in addition to any combination of
arguments from the previous syntaxes. For example, Name=Value)Course=course
specifies the course angle course, which defines the steering direction
of the actor or vehicle at each waypoint.
Smoothed Trajectory from Actor Arrival Times
Since R2024b
smoothTrajectory(
creates a smoothed trajectory for an actor or vehicle, ac,waypoints,TimeOfArrival=timeOfArrival)ac, from a set
of waypoints, waypoints, using the arrival time of the actor at each
waypoint timeOfArrival.
smoothTrajectory(
specifies options using one or more name-value arguments. For example,
ac,waypoints,TimeOfArrival=timeOfArrival,Name=Value)MotionDirection=motionDirection specifies the direction
motionDirection for the actor to move at each waypoint.
Examples
Create a driving scenario containing a curved two-lane road.
scenario = drivingScenario('SampleTime',0.05); roadcenters = [0 0; 24.2 27.7; 50 30]; lspec = lanespec(2); road(scenario,roadcenters,'Lanes',lspec);
Add a vehicle to the scenario. Set a trajectory in which the vehicle slows down as it enters the curve.
v = vehicle(scenario,'ClassID',1);
waypoints = [2.6 1.0; 23.6 24.9; 45.5 28.6];
speed = [9 8 9];
smoothTrajectory(v,waypoints,speed)
Plot the scenario and run the simulation.
plot(scenario,'Waypoints','on','RoadCenters','on') while advance(scenario) pause(scenario.SampleTime) end

Create a driving scenario containing a four-way intersection.
scenario = drivingScenario('SampleTime',0.02,'StopTime',20); roadCenters = [0 0; 50 0]; laneSpecification = lanespec([1 1]); road(scenario,roadCenters,'Lanes',laneSpecification); roadCenters = [25 25; 25 -25]; road(scenario,roadCenters,'Lanes',laneSpecification);
Add the ego vehicle, which travels north but waits for one second at the intersection.
ego = vehicle(scenario,'ClassID',1,'Position',[2 -2 0]); waypoints = [2 -2; 17.5 -2; 45 -2]; speed = [5 0 5]; waittime = [0 1 0]; smoothTrajectory(ego,waypoints,speed,waittime);
Add a bicyclist that travels east through the intersection at a constant speed without stopping.
bicycle = actor(scenario, ... 'ClassID',3, ... 'Length',1.7, ... 'Width',0.45, ... 'Height',1.7, ... 'Position',[23 23 0]); waypoints = [23 23; 23 -23]; speed = 4; smoothTrajectory(bicycle,waypoints,speed);
Plot the scenario. The vehicle stops at the intersection for one second, then resumes driving after the bicyclist crosses the intersection.
plot(scenario) while advance(scenario) pause(scenario.SampleTime) end

Simulate a driving scenario in which a car drives in reverse to back into a parking space.
Create a driving scenario containing a parking lot.
scenario = drivingScenario; vertices = [0 9; 18 9; 18 -9; 0 -9]; parkingLot(scenario,vertices,ParkingSpace=parkingSpace);
Create a car and define its trajectory. The car drives forward, stops, and then drives in reverse to back into the parking space. As the car enters the parking space, it has a yaw orientation angle that is 90 degrees counterclockwise from where it started.
car = vehicle(scenario,ClassID=1); waypoints = [9 -5; 9 5; 6 -1.3; 2 -1.3]; speed = [3; 0; -2; 0]; yaw = [90 90 180 180]; smoothTrajectory(car,waypoints,speed,Yaw=yaw)
Plot the driving scenario and display the waypoints of the trajectory.
plot(scenario,Waypoints="on") while advance(scenario) pause(scenario.SampleTime) end

Create the trajectory of a pedestrian who takes a sharp right turn at an intersection.
Create a driving scenario. Add road segments that define an intersection.
scenario = drivingScenario; roadCenters = [0 10; 0 -10]; road(scenario,roadCenters); road(scenario,flip(roadCenters,2));
Add a pedestrian actor to the scenario.
pedestrian = actor(scenario, ... 'ClassID',4, ... 'Length',0.24, ... 'Width',0.45, ... 'Height',1.7, ... 'Position',[-9 0 0], ... 'RCSPattern',[-8 -8; -8 -8], ... 'Mesh',driving.scenario.pedestrianMesh, ... 'Name','Pedestrian');
Define the trajectory of the pedestrian. The pedestrian approaches the intersection, pauses briefly, and then takes a sharp right turn at the intersection. To define the sharp right turn, specify two waypoints at the intersection that are close together. For these waypoints, specify the yaw orientation angle of the second waypoint at a 90-degree angle from the first waypoint.
waypoints = [-9 0; -0.25 0; 0 -0.25; 0 -9];
speed = [1.5; 0; 0.5; 1.5];
yaw = [0; 0; -90; -90];
waittime = [0; 0.2; 0; 0];
smoothTrajectory(pedestrian,waypoints,speed,waittime,'Yaw',yaw);
Plot the driving scenario and display the waypoints of the pedestrian.
plot(scenario,'Waypoints','on') while advance(scenario) pause(0.001) end

Generate measurements from an INS sensor that is mounted to a vehicle in a driving scenario. Plot the INS measurements against the ground truth state of the vehicle and visualize the velocity and acceleration profile of the vehicle.
Create Driving Scenario
Load the geographic data for a driving route at the MathWorks® Apple Hill campus in Natick, MA.
data = load('ahroute.mat');
latIn = data.latitude;
lonIn = data.longitude;Convert the latitude and longitude coordinates of the route to Cartesian coordinates. Set the origin to the first coordinate in the driving route. For simplicity, assume an altitude of 0 for the route.
alt = 0; origin = [latIn(1),lonIn(1),alt]; [xEast,yNorth,zUp] = latlon2local(latIn,lonIn,alt,origin);
Create a driving scenario. Set the origin of the converted route as the geographic reference point.
scenario = drivingScenario('GeoReference',origin);Create a road based on the Cartesian coordinates of the route.
roadCenters = [xEast,yNorth,zUp]; road(scenario,roadCenters);
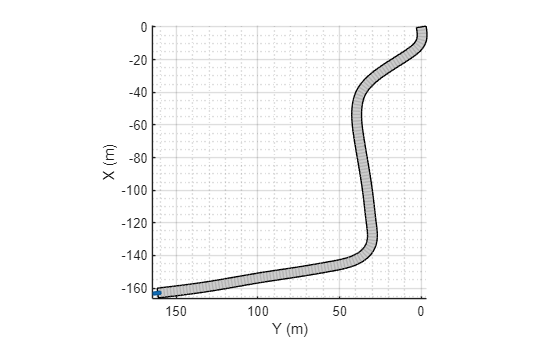
Create a vehicle that follows the center line of the road. The vehicle travels between 4 and 5 meters per second (9 to 11 miles per hour), slowing down at the curves in the road. To create the trajectory, use the smoothTrajectory function. The computed trajectory minimizes jerk and avoids discontinuities in acceleration, which is a requirement for modeling INS sensors.
egoVehicle = vehicle(scenario,'ClassID',1);
egoPath = roadCenters;
egoSpeed = [5 5 5 4 4 4 5 4 4 4 4 5 5 5 5 5];
smoothTrajectory(egoVehicle,egoPath,egoSpeed);Plot the scenario and show a 3-D view from behind the ego vehicle.
plot(scenario) chasePlot(egoVehicle)
Create INS Sensor
Create an INS sensor that accepts the input of simulation times. Introduce noise into the sensor measurements by setting the standard deviation of velocity and accuracy measurements to 0.1 and 0.05, respectively.
INS = insSensor('TimeInput',true, ... 'VelocityAccuracy',0.1, ... 'AccelerationAccuracy',0.05);
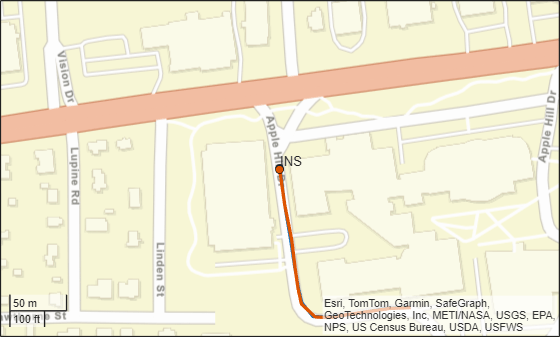
Visualize INS Measurements
Initialize a geographic player for displaying the INS measurements and the actor ground truth. Configure the player to display its last 10 positions and set the zoom level to 17.
zoomLevel = 17; player = geoplayer(latIn(1),lonIn(1),zoomLevel, ... 'HistoryDepth',10,'HistoryStyle','line');
Pre-allocate space for the simulation times, velocity measurements, and acceleration measurements that are captured during simulation.
numWaypoints = length(latIn); times = zeros(numWaypoints,1); gTruthVelocities = zeros(numWaypoints,1); gTruthAccelerations = zeros(numWaypoints,1); sensorVelocities = zeros(numWaypoints,1); sensorAccelerations = zeros(numWaypoints,1);
Simulate the scenario. During the simulation loop, obtain the ground truth state of the ego vehicle and an INS measurement of that state. Convert these readings to geographic coordinates, and at each waypoint, visualize the ground truth and INS readings on the geographic player. Also capture the velocity and acceleration data for plotting the velocity and acceleration profiles.
nextWaypoint = 2; while advance(scenario) % Obtain ground truth state of ego vehicle. gTruth = state(egoVehicle); % Obtain INS sensor measurement. measurement = INS(gTruth,scenario.SimulationTime); % Convert readings to geographic coordinates. [latOut,lonOut] = local2latlon(measurement.Position(1), ... measurement.Position(2), ... measurement.Position(3),origin); % Plot differences between ground truth locations and locations reported by sensor. reachedWaypoint = sum(abs(roadCenters(nextWaypoint,:) - gTruth.Position)) < 1; if reachedWaypoint plotPosition(player,latIn(nextWaypoint),lonIn(nextWaypoint),'TrackID',1) plotPosition(player,latOut,lonOut,'TrackID',2,'Label','INS') % Capture simulation times, velocities, and accelerations. times(nextWaypoint,1) = scenario.SimulationTime; gTruthVelocities(nextWaypoint,1) = gTruth.Velocity(2); gTruthAccelerations(nextWaypoint,1) = gTruth.Acceleration(2); sensorVelocities(nextWaypoint,1) = measurement.Velocity(2); sensorAccelerations(nextWaypoint,1) = measurement.Acceleration(2); nextWaypoint = nextWaypoint + 1; end if nextWaypoint > numWaypoints break end end
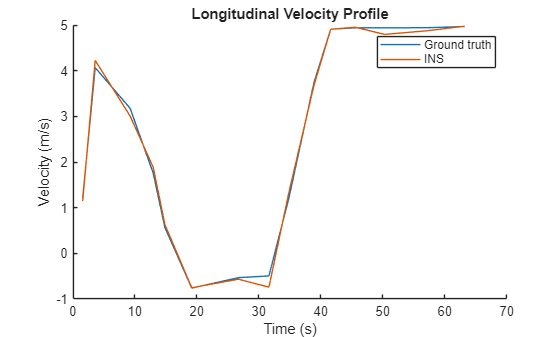
Plot Velocity Profile
Compare the ground truth longitudinal velocity of the vehicle over time against the velocity measurements captured by the INS sensor.
Remove zeros from the time vector and velocity vectors.
times(times == 0) = []; gTruthVelocities(gTruthVelocities == 0) = []; sensorVelocities(sensorVelocities == 0) = []; figure hold on plot(times,gTruthVelocities) plot(times,sensorVelocities) title('Longitudinal Velocity Profile') xlabel('Time (s)') ylabel('Velocity (m/s)') legend('Ground truth','INS') hold off
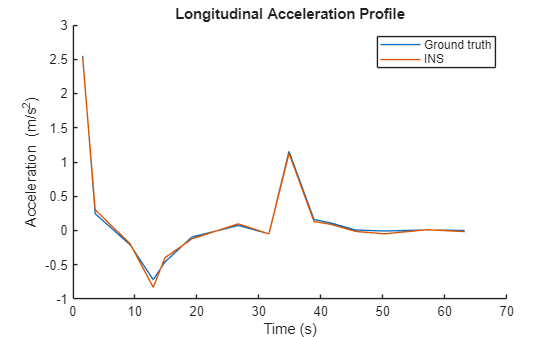
Plot Acceleration Profile
Compare the ground truth longitudinal acceleration of the vehicle over time against the acceleration measurements captured by the INS sensor.
gTruthAccelerations(gTruthAccelerations == 0) = []; sensorAccelerations(sensorAccelerations == 0) = []; figure hold on plot(times,gTruthAccelerations) plot(times,sensorAccelerations) title('Longitudinal Acceleration Profile') xlabel('Time (s)') ylabel('Acceleration (m/s^2)') legend('Ground truth','INS') hold off
Since R2024b
Create two driving scenario objects.
scenario1 = drivingScenario(StopTime=0.85); scenario2 = drivingScenario(StopTime=0.85);
Add road and lane segments to both the driving scenarios.
roadCenters = [0.31 21.84 0;
35.5 5.85 0;
28.6 1.35 0;
22.8 -18.64 0];
marking = [laneMarking("Solid",Color=[0.98 0.86 0.36]) ...
laneMarking("Dashed") ...
laneMarking("Dashed")];
laneSpecification = lanespec(2,Width=5,Marking=marking);
road(scenario1,roadCenters,Lanes=laneSpecification,Name="Road1");
road(scenario2,roadCenters,Lanes=laneSpecification,Name="Road2");Specify the vehicle parameters for both the scenarios.
egoVehicle1 = vehicle(scenario1, ... ClassID=2, ... Length=12, ... Width=2.5, ... Height=3.5, ... Position=[12.01 21.84 0.01], ... RearOverhang=1, ... FrontOverhang=0.9, ... Mesh=driving.scenario.truckMesh, ... PlotColor=[0.494 0.184 0.556], ... Name="Truck1"); egoVehicle2 = vehicle(scenario2, ... ClassID=2, ... Length=12, ... Width=2.5, ... Height=3.5, ... Position=[12.01 21.84 0.01], ... RearOverhang=1, ... FrontOverhang=0.9, ... Mesh=driving.scenario.truckMesh, ... PlotColor=[0.466 0.674 0.188], ... Name="Truck2");
Specify waypoints and relative actor arrival times.
waypoints = [11.91 23.84 0.01;
19.7 25.94 0.01;
31.8 24.34 0.01;
40.29 15.55 0.01;
38.59 5.15 0.01;
31 0.05 0.01;
26.4 -4.75 0.01;
25.3 -12.04 0.01];
actorArrivalTimes = [0 0.2 0.4 0.6 0.8 1 1.2 1.5]';Create a trajectory for the vehicle1, with reference to the front-axle for steering, using actor arrival times.
smoothTrajectory(egoVehicle1,waypoints,TimeOfArrival=actorArrivalTimes,ReferenceSteerPosition="front-axle");Create another trajectory for the vehicle2, with reference to the default rear-axle for steering, using actor arrival times.
smoothTrajectory(egoVehicle2,waypoints,TimeOfArrival=actorArrivalTimes);
Plot and simulate the scenarios, displaying the front-axle and rear-axle smoothed trajectories. Observe the first subplot contains a dashed line trajectory for the rear axle, created with reference to the front-axle steering.
fig = figure(Visible="on"); % Ensure the figure is visible axesWidth = 0.35; % Relative width of each axes axesHeight = 0.8; % Relative height of each axes margin = 0.1; % Margin from left/right and between axes % Calculate axes positions of each subplot for equal spacing pos1 = [margin 0.1 axesWidth axesHeight]; pos2 = [1-(margin+axesWidth) 0.1 axesWidth axesHeight]; % Specify title to the first axes in the figure ax1 = axes(fig,Position=pos1); title(ax1,{"Smoothed Trajectory with","Front-Axle Steering"}) % Specify title to the second axes in the figure ax2 = axes(fig,Position=pos2); title(ax2,{"Smoothed Trajectory with","Rear-Axle Steering"}) % Plot and simulate the scenarios plot(scenario1,Waypoints="on",RoadCenters="on",ShowRearAxle="on",Parent=ax1) plot(scenario2,Waypoints="on",RoadCenters="on",ShowRearAxle="on",Parent=ax2) while advance(scenario1) && advance(scenario2) pause(0.1) end

Input Arguments
Name-Value Arguments
Limitations
If you create a
drivingScenarioobject containing trajectory for a vehicle with front axle steering and import it into the Driving Scenario Designer app, the app represents it as a scenario with rear axle trajectory.If the input
drivingScenarioobject contains trajectory for a vehicle with front axle steering and import it into RoadRunner using thestartRoadRunnerForScenariofunction, the RoadRunner scenario represents that vehicle trajectory with steering located at the center of that vehicle.
Tips
If the
smoothTrajectoryfunction is unable to compute a smooth, jerk-limited trajectory given the input parameters, try making these adjustments to the scenario:Extend the distances between waypoints to give the vehicle more time to accelerate to the specified speeds.
Lower the speeds at each waypoint. Try converting the speed values from meters per second to miles per hour to see if the speeds are realistic given the scenario. For example, the algorithm is unlikely to successfully compute a smooth trajectory for a sharp turn that is taken at a speed of 30 m/s (about 67 mph).
Increase the maximum jerk. Increasing the jerk maximum enables the algorithm to compute more possible trajectories, at the expense of reduced human passenger comfort.
To get the position of the vehicle with reference to a specific vehicle body location, use the
getReferencePositionfunction.If a driving scenario contains a front-axle trajectory for at least one vehicle, you can get the front-axle position from the
FrontAxlePositionfield of theActorPosesstructure returned by therecordfunction.If a driving scenario contains a front-axle trajectory, to plot both the rear-axle and front-axle trajectories, specify the
ShowRearAxlename-value argument of theplotfunction as"on".
Algorithms
The smoothTrajectory function creates a jerk-limited trajectory using
a trapezoidal acceleration profile. This trajectory has smooth acceleration transitions
between waypoints, resulting in a comfortable ride for human passengers. The function
calculates a separate trapezoidal acceleration profile for each of the N -
1 segments between trajectory waypoints.
Consider a simple scenario in which a car travels a distance of 50 meters along a 100-meter road. The trajectory consists of one 50-meter segment in which the car must increase its speed from 5 m/s to 10 m/s by the end of the segment. The trajectory has an additional constraint in which the maximum longitudinal jerk must not exceed 0.5 m/s3.
scenario = drivingScenario; car = vehicle(scenario); road(scenario,[0 -25; 0 75]); % m waypoints = [0 0; 0 50]; % m speed = [5 10]; % m/s jerk = 0.5; % m/s^3 smoothTrajectory(car,waypoints,speed,'Jerk',jerk)
Given the distance, speed, and jerk constraints of this waypoint segment, the
smoothTrajectory function generates a three-phase trapezoidal
acceleration profile:
Increase acceleration linearly. Hold jerk constant at a value no greater than
jerk.Hold acceleration constant. Decrease jerk to 0.
Decrease acceleration linearly. Hold jerk constant at a value no less than
-jerk.
These plots visualize the distance, speed, acceleration, and jerk profile along this waypoint segment over time. The three phases of the acceleration profile form a trapezoidal shape.

When speed decreases between waypoints, the smoothTrajectory function
generates the three-phase trapezoidal acceleration profile in reverse order. In the decreased
speed case, the shape of the acceleration profile is the inverse of the one shown in the
previous plot.
References
[1] Bae, Il, Jaeyoung Moon, and Jeongseok Seo. "Toward a Comfortable Driving Experience for a Self-Driving Shuttle Bus." Electronics 8, no. 9 (August 27, 2019): 943. https://doi.org/10.3390/electronics8090943.