predict
Predecir la salida del modelo identificado con K pasos de anticipación
Sintaxis
Descripción
Este comando predict calcula la salida de K pasos adelante de un modelo identificado utilizando datos de entrada-salida medidos. Para identificar el modelo, primero se recopilan todos los datos de entrada y salida y luego se estiman los parámetros del modelo fuera de línea. Para realizar una estimación del estado en línea de un sistema no lineal utilizando datos en tiempo real, utilice el comando predict para filtros de Kalman extendidos y unscented.
yp = predict(sys,data,K)sys, K avanza utilizando los datos de entrada-salida medidos.
El comando predict predice la respuesta de salida durante el lapso de tiempo de los datos medidos. Por el contrario, forecast realiza predicciones sobre el futuro en un rango de tiempo más allá del último instante de los datos medidos. Utilice predict para validar sys durante el lapso de tiempo de los datos medidos.
data puede ser un horario, un par de matrices de entrada/salida separadas por comas o un objeto iddata.
predict( grafica la salida prevista. Úselo con cualquiera de las combinaciones de argumentos de entrada anteriores. Para cambiar las opciones de visualización en el gráfico, haga clic derecho en el gráfico para acceder al menú contextual. Para obtener más detalles sobre el menú, consulte Sugerencias .sys,data,K,___)
También puede trazar la respuesta del modelo previsto utilizando el comando compare. El comando compare compara los resultados de la predicción con los datos observados y muestra un ajuste cuantitativo.
Ejemplos
Simular datos de series de tiempo.
init_sys = idpoly([1 -0.99],[],[1 -1 0.2]);
opt = simOptions('AddNoise',true);
u = iddata([],zeros(400,0),1);
data = sim(init_sys,u,opt);data es un objeto iddata que contiene los datos de respuesta simulada de un modelo de serie temporal.
Estime un modelo ARMAX utilizando data como datos de estimación.
na = 1; nb = 2; sys = armax(data(1:200),[na nb]);
Predecir la salida del modelo utilizando un horizonte de predicción de 4.
K = 4; yp = predict(sys,data,K);
yp es un objeto iddata. La salida prevista se devuelve en la propiedad OutputData del objeto.
Compare los resultados de datos previstos y estimados.
plot(data(201:400),yp(201:400)); legend('Estimation data','Predicted data');
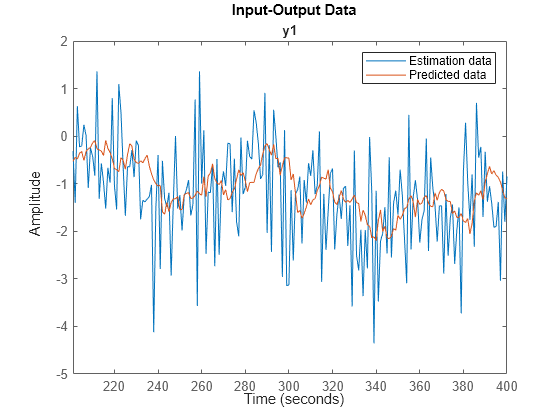
Alternativamente, para trazar la respuesta prevista y los datos de estimación, utilice compare(sys,data,K) .
Cargue los datos de la estimación.
load sdata1 tt1; data = tt1;
Estimar un modelo ARX de orden [2 2 1].
sys1 = arx(data,[2 2 1]);
Estimar una función de transferencia con 2 polos.
sys2 = tfest(data,2);
Cree un conjunto de opciones predict para especificar condiciones iniciales cero para la predicción.
opt = predictOptions('InitialCondition','z');
Grafique los resultados previstos para los modelos estimados. Utilice el conjunto de opciones de predicción especificado, opt, y especifique el horizonte de predicción como 10. Especifique estilos de línea para trazar la salida prevista de cada sistema.
predict(sys1,'r--',sys2,'b',data,10,opt);

Para cambiar las opciones de visualización, haga clic derecho en el gráfico para acceder al menú contextual. Por ejemplo, para ver los datos de estimación, seleccione Mostrar datos de validación en el menú contextual. Para ver el error de predicción, seleccione Gráfico de error de predicción.
También puede trazar la respuesta prevista utilizando el comando compare. Para ello, primero cree un conjunto de opciones para compare para especificar el uso de condiciones iniciales cero.
opt = compareOptions('InitialCondition','z'); compare(data,sys1,'r--',sys2,'b',10,opt);

Utilice datos de estimación para estimar un modelo y luego calcule la salida del modelo previsto y el modelo predictor utilizando el comando predict. Simular el modelo predictor para reproducir el resultado previsto.
Estimación de datos de carga.
load sdata3 umat3 ymat3 Ts
Estimar un modelo polinomial a partir de los datos.
sys = polyest(umat3,ymat3,[2 2 2 0 0 1]);
Predecir la respuesta del sistema utilizando el horizonte de predicción 4.
K = 4; [yp,ic,sysp] = predict(sys,umat3,ymat3,K);
yp es la respuesta del modelo prevista, ic contiene las condiciones iniciales estimadas y sysp es el modelo predictor.
Simular el modelo predictor con entradas [data.OutputData,data.InputData] y condiciones iniciales ic.
opt = simOptions; opt.InitialCondition = ic; ys = sim(sysp,[ymat3,umat3],opt);
Grafique los resultados previstos y simulados.
ns = size(ys,1); t = [1:Ts:ns]'; plot(t,yp,'b',t,ys,'.r'); legend('Predicted Output','Simulated Output')

Incorpore las condiciones iniciales que obtuvo previamente en su predicción del modelo.
Cargue los datos.
load iddata1ic z1i
Especifique la opción de estimación ARMAX para estimar el estado inicial.
estimOpt = armaxOptions('InitialCondition','estimate');
Estima un modelo ARMAX y devuelve un objeto initialCondition ic que encapsula las condiciones iniciales en forma de espacio de estados.
na = 2; nb = 2; nc = 2; nk = 1; [sys,ic] = armax(z1i,[na nb nc nk],estimOpt);
Especifique las condiciones iniciales para la predicción.
predictOpt = predictOptions('InitialCondition',ic);Predecir el modelo y obtener la respuesta del modelo. Grafique la respuesta y con los datos medidos.
y = predict(sys,z1i,predictOpt); plot(z1i,y) legend('Measured Data','Predicted Response')

Las respuestas medidas y previstas muestran una buena concordancia al inicio de la predicción.
Realizar predicciones de modelos utilizando datos históricos para especificar las condiciones iniciales. Primero se predice utilizando el comando predict y se especifican los datos históricos utilizando el conjunto de opciones predictOptions. Luego, reproduce la respuesta prevista asignando manualmente los datos históricos a los estados iniciales.
Cargue un conjunto de datos de dos entradas y una salida.
load iddata7 z7
Identifique un modelo de espacio de estados de quinto orden utilizando los datos.
sys = n4sid(z7,5);
Divida el conjunto de datos en dos partes.
zA = z7(1:15); zB = z7(16:end);
Supongamos que desea calcular la predicción con 10 pasos de anticipación de la respuesta del sistema identificado para los datos zB. Para las condiciones iniciales, utilice los valores de señal en zA como registro histórico. Es decir, los valores de entrada y salida para el tiempo inmediatamente anterior a los datos en zB.
IO = struct('Input',zA.InputData,'Output',zA.OutputData); opt = predictOptions('InitialCondition',IO);
Genere la predicción de 10 pasos por adelantado para los datos zB utilizando las condiciones iniciales especificadas y predict.
[yp,x0,Predictor] = predict(sys,zB,10,opt);
yp es la respuesta del modelo previsto, x0 son los estados iniciales correspondientes al modelo predictor Predictor. Puedes simular Predictor utilizando x0 como condiciones iniciales para reproducir yp.OutputData.
Ahora reproduzca la salida asignando manualmente los datos históricos a los estados iniciales. Para ello, minimice los errores de predicción de 1 paso durante el lapso de tiempo de zA.
x0est = data2state(sys,zA);
x0est contiene los valores de los cinco estados de sys en el instante de tiempo inmediatamente posterior a la muestra de datos más reciente en zA.
El Predictor tiene más estados que el sistema original debido al horizonte de predicción de 10 pasos. Especifique los estados adicionales inducidos por el horizonte a valores iniciales cero y luego agregue x0est.
x0Predictor = zeros(order(Predictor),1); x0Predictor(end-4:end) = x0est;
Simule el predictor utilizando [zB.OutputData,zB.InputData] como señal de entrada y x0Predictor como condiciones iniciales.
uData = [zB.OutputData,zB.InputData]; % signals required for prediction
[ysim,t,xsim] = lsim(Predictor,uData,[],x0Predictor);Grafique la salida prevista del comando predict yp.OutputData y los resultados calculados manualmente ysim.
plot(t,yp.OutputData,t,ysim, '.')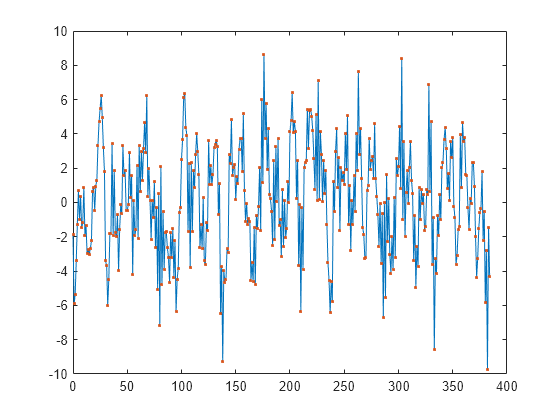
ysim es lo mismo que yp.OutputData.
Argumentos de entrada
Argumentos de salida
Sugerencias
Al hacer clic derecho en el gráfico del resultado previsto, se abre el menú contextual, donde puede acceder a las siguientes opciones:
Systems — Seleccione sistemas para ver la respuesta prevista. De forma predeterminada, se grafica la respuesta de todos los sistemas.
Data Experiment — Solo para datos de experimentos múltiples. Alternar entre datos de diferentes experimentos.
Characteristics — Ver las siguientes características de los datos:
Peak Value — Ver el valor máximo absoluto de los datos. Aplicable únicamente a datos del dominio del tiempo.
Peak Response — Ver la respuesta máxima de los datos. Aplicable únicamente a datos de respuesta en frecuencia.
Mean Value — Ver el valor medio de los datos. Aplicable únicamente a datos del dominio del tiempo.
Show — Solo para datos de dominio de frecuencia y de respuesta en frecuencia.
Magnitude — Ver la magnitud de la respuesta de frecuencia del sistema.
Phase — Ver la fase de la respuesta de frecuencia del sistema.
Show Validation Data — Gráfico de datos utilizados para predecir la respuesta del modelo.
I/O Grouping — Para conjuntos de datos que contienen más de un canal de entrada o salida. Seleccione la agrupación de canales de entrada y salida en el gráfico.
None — Traza los canales de entrada y salida en sus propios ejes separados.
All — Agrupa todos los canales de entrada juntos y todos los canales de salida juntos.
I/O Selector — Para conjuntos de datos que contienen más de un canal de entrada o salida. Seleccione un subconjunto de los canales de entrada y salida para graficar. De forma predeterminada, se trazan todos los canales de salida.
Grid — Agrega cuadrículas al gráfico.
Normalize — Normaliza la escala y de todos los datos del gráfico.
Full View — Regresar a la vista completa. De forma predeterminada, el gráfico se escala a la vista completa.
Prediction Horizon — Establezca el horizonte de predicción o elija simulación.
Initial Condition — Especifica el manejo de las condiciones iniciales. No aplicable para datos de respuesta en frecuencia.
Especifique como uno de los siguientes:
Estimate — Tratar las condiciones iniciales como parámetros de estimación.
Zero — Establece todas las condiciones iniciales en cero.
Absorb delays and estimate — Absorbe los retrasos distintos de cero en los coeficientes del modelo y trata las condiciones iniciales como parámetros de estimación. Utilice esta opción únicamente para modelos de tiempo discreto.
Predicted Response Plot — Grafica la respuesta del modelo previsto. De forma predeterminada, se muestra el gráfico de respuesta.
Prediction Error Plot — Grafica el error entre la respuesta del modelo y los datos de predicción.
Properties — Abre el cuadro de diálogo Editor de propiedades para personalizar los atributos del gráfico.