bwdist
Transformada de distancia de una imagen binaria
Descripción
[ también calcula el mapa de los píxeles más cercanos en forma de arreglo de índices, D,idx] = bwdist(BW)idx. Cada elemento de idx contiene el índice lineal del píxel de BW distinto de cero más cercano. El mapa de los píxeles más cercanos también se denomina mapa de características, transformada de características o transformada de los entornos más cercanos.
Ejemplos
En este ejemplo se muestra cómo calcular la transformada de distancia euclidiana de una imagen binaria y el mapa de los píxeles más cercanos de la imagen.
Cree una imagen binaria.
bw = zeros(5,5); bw(2,2) = 1; bw(4,4) = 1
bw = 5×5
0 0 0 0 0
0 1 0 0 0
0 0 0 0 0
0 0 0 1 0
0 0 0 0 0
Calcule la transformada de distancia.
[D,IDX] = bwdist(bw)
D = 5×5 single matrix
1.4142 1.0000 1.4142 2.2361 3.1623
1.0000 0 1.0000 2.0000 2.2361
1.4142 1.0000 1.4142 1.0000 1.4142
2.2361 2.0000 1.0000 0 1.0000
3.1623 2.2361 1.4142 1.0000 1.4142
IDX = 5×5 uint32 matrix
7 7 7 7 7
7 7 7 7 19
7 7 7 19 19
7 7 19 19 19
7 19 19 19 19
En la matriz del entorno más cercano IDX, los valores 7 y 19 representan la posición de los elementos distintos de crero utilizando la indexación de matrices lineales. Si un píxel contiene un 7, su entorno distinto de cero más cercano se encuentra en la posición lineal 7.
En este ejemplo se muestra cómo comparar transformadas de distancia 2D para métodos de distancia compatibles. En la figura, observe cómo la transformada de distancia cuasi-euclidiana es la que mejor se aproxima a la forma circular obtenida mediante el método de distancia euclidiana.
bw = zeros(200,200); bw(50,50) = 1; bw(50,150) = 1; bw(150,100) = 1; D1 = bwdist(bw,'euclidean'); D2 = bwdist(bw,'cityblock'); D3 = bwdist(bw,'chessboard'); D4 = bwdist(bw,'quasi-euclidean'); RGB1 = repmat(rescale(D1), [1 1 3]); RGB2 = repmat(rescale(D2), [1 1 3]); RGB3 = repmat(rescale(D3), [1 1 3]); RGB4 = repmat(rescale(D4), [1 1 3]); figure subplot(2,2,1), imshow(RGB1), title('Euclidean') hold on, imcontour(D1) subplot(2,2,2), imshow(RGB2), title('Cityblock') hold on, imcontour(D2) subplot(2,2,3), imshow(RGB3), title('Chessboard') hold on, imcontour(D3) subplot(2,2,4), imshow(RGB4), title('Quasi-Euclidean') hold on, imcontour(D4)

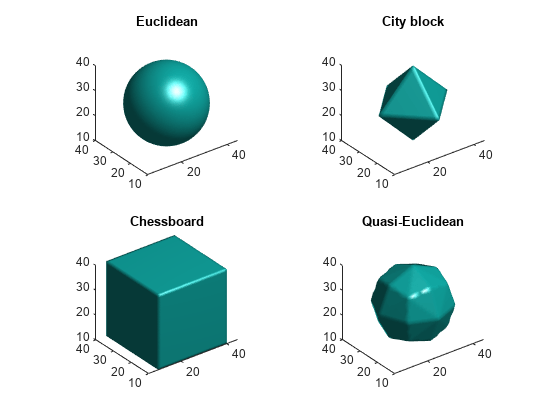
En este ejemplo se muestra cómo comparar diagramas de isosuperficie para las transformadas de distancia de una imagen 3D que contiene un solo píxel distinto de cero en el centro.
bw = zeros(50,50,50); bw(25,25,25) = 1; D1 = bwdist(bw); D2 = bwdist(bw,'cityblock'); D3 = bwdist(bw,'chessboard'); D4 = bwdist(bw,'quasi-euclidean'); figure subplot(2,2,1), isosurface(D1,15), axis equal, view(3) camlight, lighting gouraud, title('Euclidean') subplot(2,2,2), isosurface(D2,15), axis equal, view(3) camlight, lighting gouraud, title('City block') subplot(2,2,3), isosurface(D3,15), axis equal, view(3) camlight, lighting gouraud, title('Chessboard') subplot(2,2,4), isosurface(D4,15), axis equal, view(3) camlight, lighting gouraud, title('Quasi-Euclidean')
Argumentos de entrada
Argumentos de salida
Sugerencias
bwdistutiliza algoritmos rápidos para calcular la verdadera transformada de distancia euclidiana, especialmente en el caso 2D. Los otros métodos se ofrecen principalmente por motivos didácticos. Sin embargo, las transformadas de distancia alternativas a veces son notablemente más rápidas en las imágenes de entrada multidimensionales, particularmente en aquellas que tienen muchos elementos distintos de cero.La función
bwdistcambió en la versión 6.4 (R2009b). Las versiones anteriores de Image Processing Toolbox usaban algoritmos distintos para calcular la transformada de distancia euclidiana y la matriz de etiquetas asociada. Si necesita los mismos resultados que producía la versión anterior, utilice la funciónbwdist_old.
Algoritmos
En las transformadas de distancia euclidiana,
bwdistutiliza el algoritmo rápido. [1]En las transformadas de distancia cuasi-euclidiana chessboard y cityblock,
bwdistutiliza el algoritmo de barrido secuencial de dos pasos. [2]Las medidas de distancias distintas se obtienen utilizando juegos de ponderaciones diferentes en los barridos, según se describe en [3].
Referencias
[1] Maurer, Calvin, Rensheng Qi, and Vijay Raghavan, "A Linear Time Algorithm for Computing Exact Euclidean Distance Transforms of Binary Images in Arbitrary Dimensions," IEEE Transactions on Pattern Analysis and Machine Intelligence, Vol. 25, No. 2, February 2003, pp. 265-270.
[2] Rosenfeld, Azriel and John Pfaltz, "Sequential operations in digital picture processing," Journal of the Association for Computing Machinery, Vol. 13, No. 4, 1966, pp. 471-494.
[3] Paglieroni, David, "Distance Transforms: Properties and Machine Vision Applications," Computer Vision, Graphics, and Image Processing: Graphical Models and Image Processing, Vol. 54, No. 1, January 1992, pp. 57-58.