makehdr
Create high dynamic range image
Syntax
Description
HDR = makehdr(imds)HDR from
the set of spatially registered LDR images stored as ImageDatastore object,
imds.
HDR = makehdr(___,Name,Value)
Note
The input image files must contain the Exchangeable Image File Format
(EXIF) exposure metadata. makehdr uses the middle
exposure between the brightest and darkest images as the base exposure for
the HDR calculations. This value does not need to appear in any particular
file. For more information about calculating this middle exposure value, see
Algorithms.
HDR = makehdr(images,Name,Value)HDR from the set of
spatially registered LDR images stored in a cell array images.
Specify the exposure values for images in the input cell array by using the
name-value pair 'ExposureValues' or
'RelativeExposure'.
Note
When input is a cell array of LDR images, you must specify either the
exposure or the relative exposure values as the second input argument. To
specify the exposure values, use the name-value pair
'ExposureValues'. To specify the relative exposure
values, use the name-value pair
'RelativeExposure'.
Examples
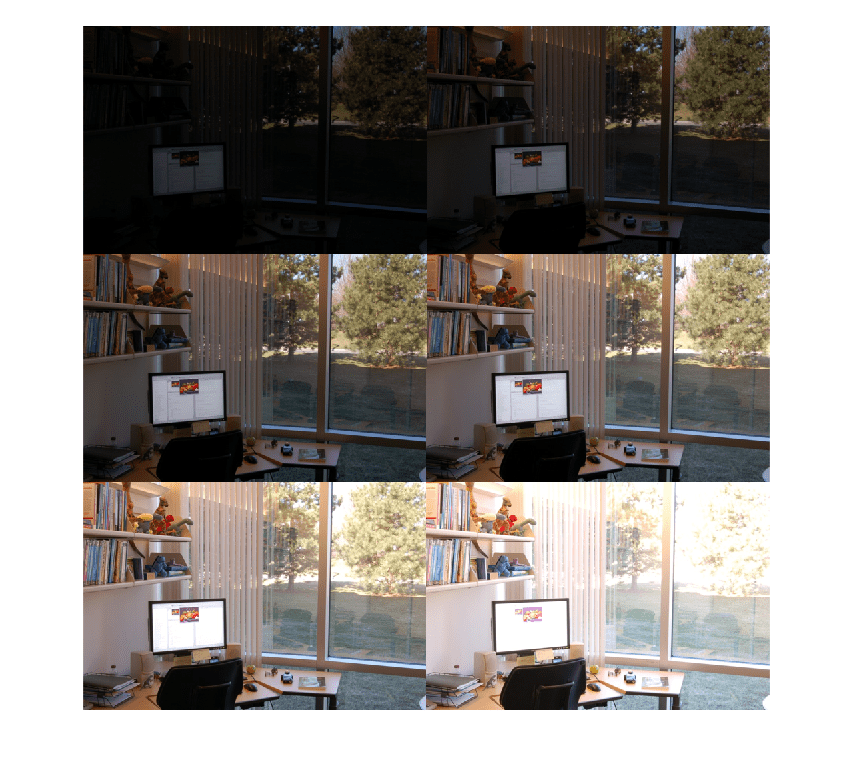
Create a high dynamic range (HDR) image from a set of low dynamic range (LDR) images that share the same f-stop but have different exposure times.
Load six low dynamic range images into the workspace. Create a vector of their respective exposure times. Display the images as a montage.
files = {'office_1.jpg','office_2.jpg','office_3.jpg',...
'office_4.jpg','office_5.jpg','office_6.jpg'};
expTimes = [0.0333 0.1000 0.3333 0.6250 1.3000 4.0000];
montage(files)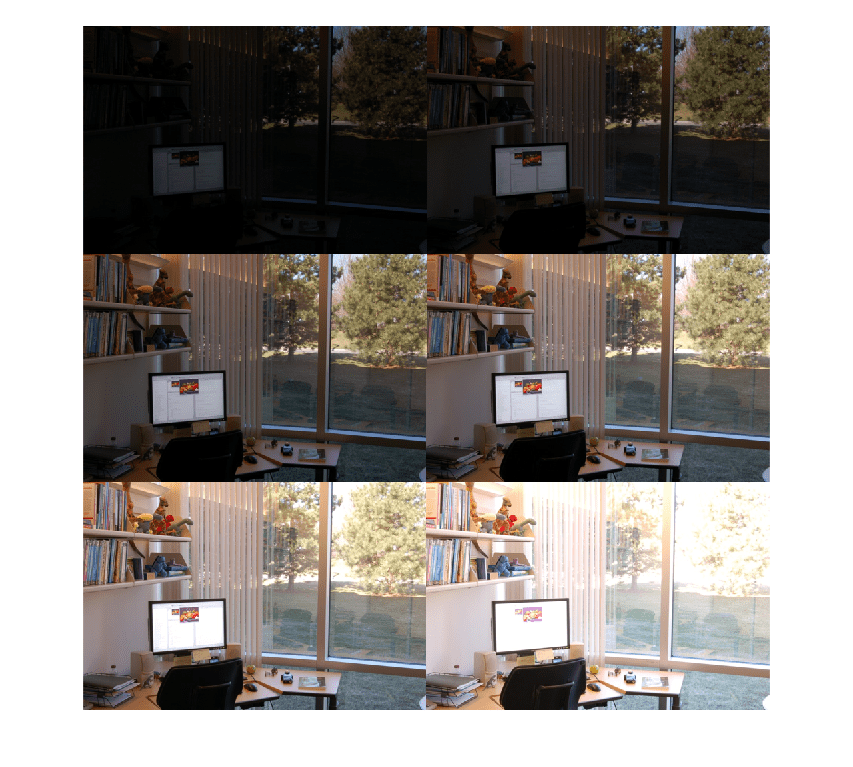
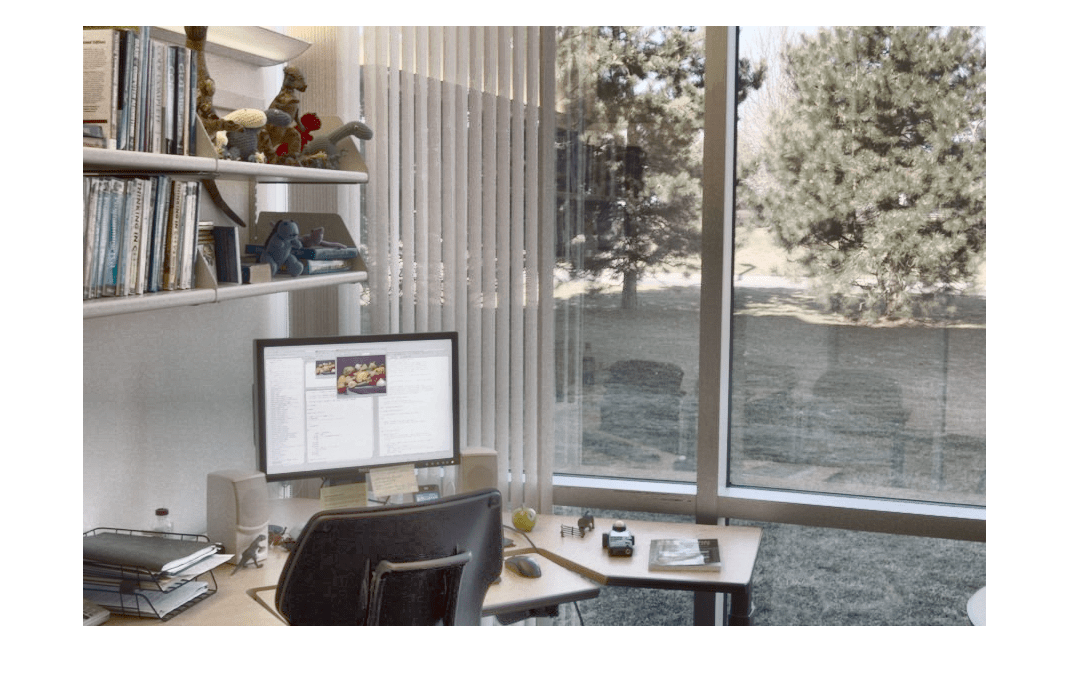
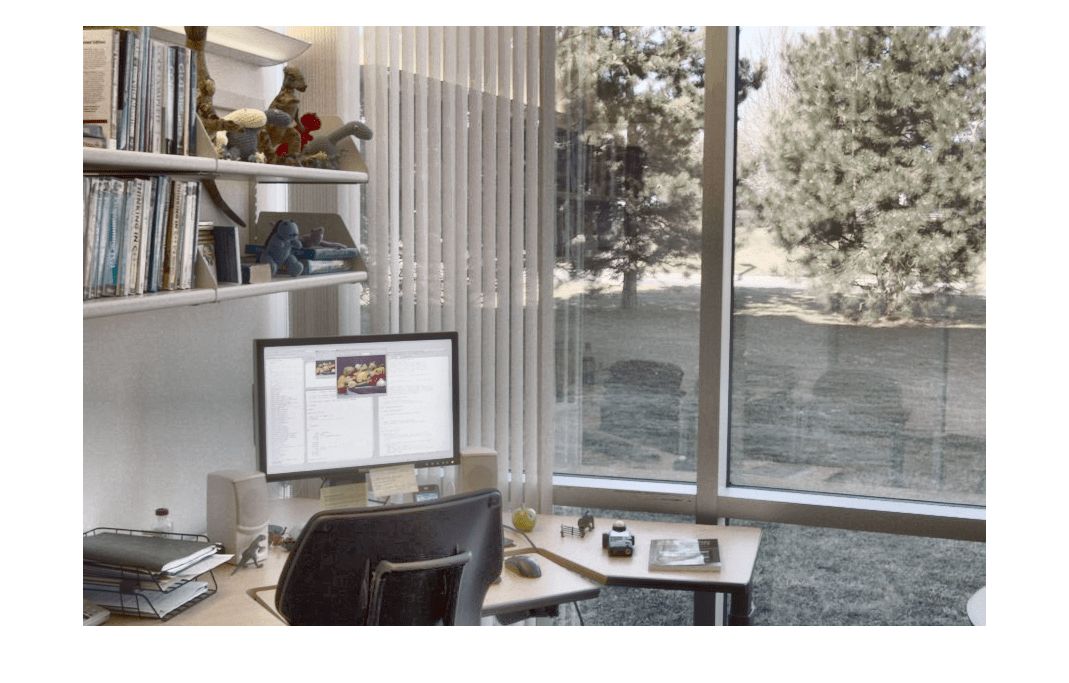
Combine the LDR images into an HDR image.
hdr = makehdr(files,'RelativeExposure',expTimes./expTimes(1));Display the HDR image.
rgb = tonemap(hdr); imshow(rgb)
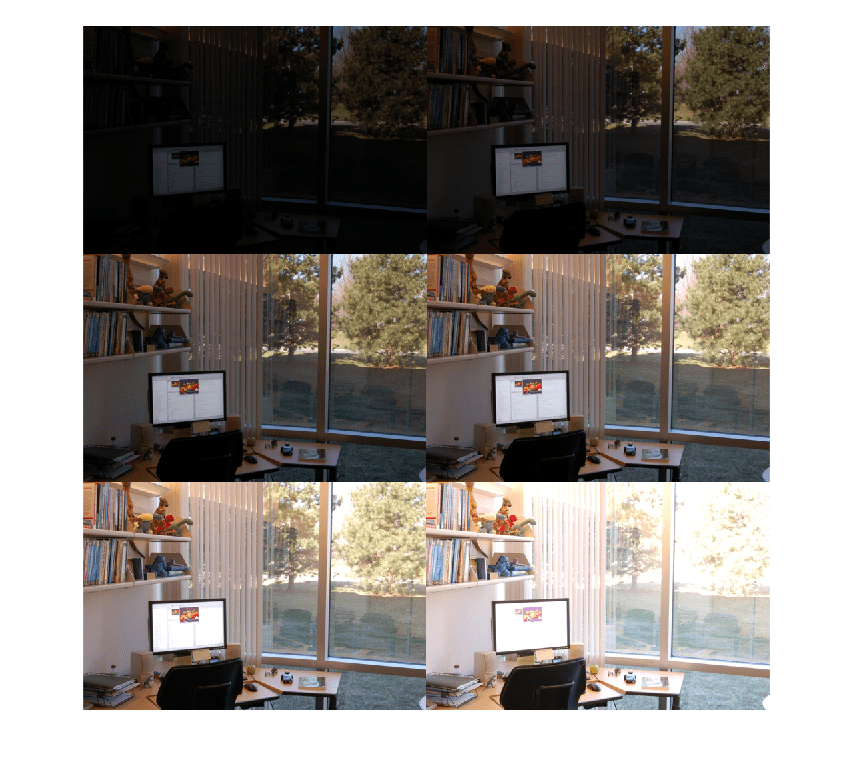
Create a high dynamic range (HDR) image from a set of six low dynamic range (LDR) images that share the same f-stop but have different exposure times. The estimated camera response function values are computed from these LDR images and used to generate an HDR image.
Read the set of six spatially registered, LDR images into the workspace. Create an imageDatastore object containing these images. Display the images as a montage.
setDir = fullfile(toolboxdir('images'),'imdata','office_*'); imds = imageDatastore(setDir); montage(imds)
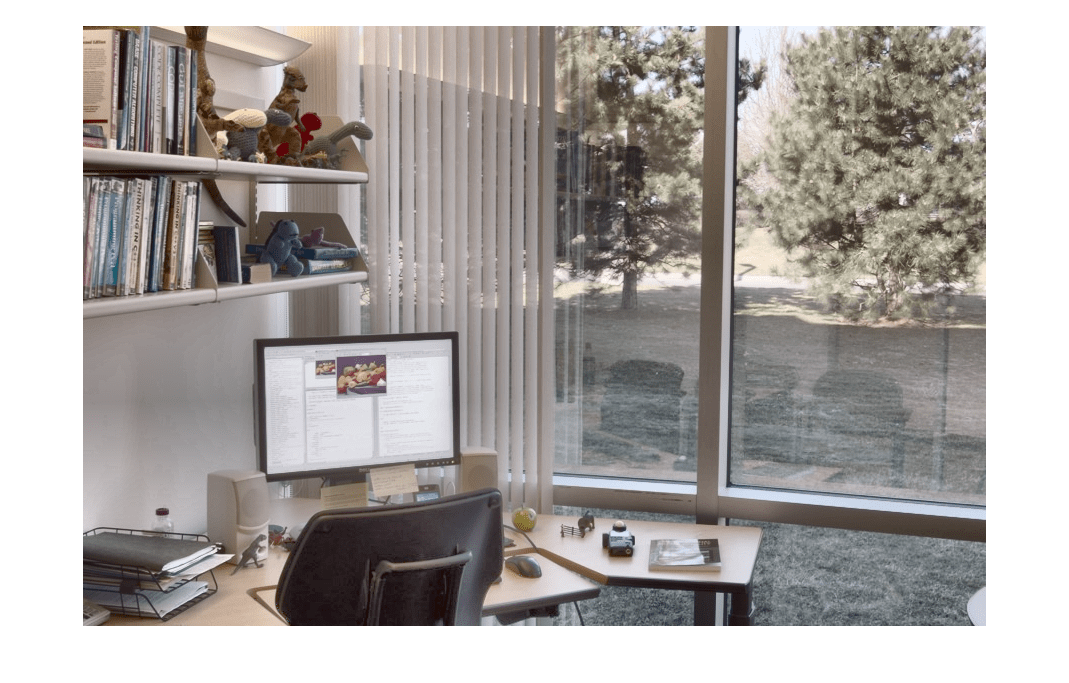
Estimate the camera response function from images in the datastore.
crf = camresponse(imds);
Combine the LDR images into an HDR image by using the estimated camera response function values.
hdr = makehdr(imds,'CameraResponse',crf);Display the HDR image.
rgb = tonemap(hdr); imshow(rgb)
Create a high dynamic range (HDR) image from a cell array of low dynamic range (LDR) images that share the same f-stop but have different exposure times.
Read six low dynamic range images into the workspace.
image1 = imread('office_1.jpg'); image2 = imread('office_2.jpg'); image3 = imread('office_3.jpg'); image4 = imread('office_4.jpg'); image5 = imread('office_5.jpg'); image6 = imread('office_6.jpg');
Create a cell array of LDR images in the workspace by using the cell construction operation, { }.
images = {image1,image2,image3,image4,image5,image6};Display the images as a montage.
montage(images)
Specify the exposure value for each LDR image in the input cell array.
exposure = [0.0333 0.1000 0.3333 0.6250 1.3000 4.0000];
Compute the relative exposure values with respect to the exposure value of the first LDR image in the input cell array.
relExposure = exposure./exposure(1);
Combine the LDR images into an HDR image. Specify the relative exposure values for each image in the cell array.
hdr = makehdr(images,'RelativeExposure',relExposure);Display the HDR image.
rgb = tonemap(hdr); imshow(rgb)
Input Arguments
Name-Value Arguments
Output Arguments
Algorithms
The makehdr function calculates the middle exposure value by using the
exposure values (EVs) of the input images. The exposure value for each image is computed
based on the aperture and shutter speed. The aperture and shutter speed values are
stored in the EXIF metadata of that input file or is specified using the
'ExposureValues' name-value pair. The middle EV is calculated as
an average of the highest and lowest EVs and is used as the base exposure.
References
[1] Reinhard et al. High Dynamic Range Imaging 2006. Ch. 4.
[2] Debevec, P.E., and J. Malik. "Recovering High Dynamic Range Radiance Maps from Photographs." In ACM SIGGRAPH 2008 classes, Article No. 31. New York, NY: ACM, 2008.
Version History
Introduced in R2008a