accelparams
Parámetros del sensor del acelerómetro
Descripción
La clase accelparams crea un objeto de parámetros del sensor de acelerómetro. Puede utilizar este objeto para modelar un acelerómetro al simular una IMU con imuSensor. Consulte la sección Algoritmos de imuSensor para obtener detalles del modelado accelparams.
Creación
Descripción
params = accelparams
params = accelparams(Name,Value)Name-Value. Name es un nombre de propiedad y Value es el valor correspondiente. Name debe aparecer entre comillas simples (''). Puede especificar varios argumentos de pares nombre-valor en cualquier orden como (Name1,Value1,...,NameN,ValueN). Cualquier propiedad no especificada toma valores predeterminados.
Propiedades
Ejemplos
Genere datos de acelerómetro para un objeto imuSensor a partir de entradas estacionarias.
Genere un objeto de parámetro de acelerómetro con una lectura máxima del sensor de 19,6 y una resolución de 0,598 . El sesgo de compensación constante es 0,49 . El sensor tiene una densidad espectral de potencia de 3920 . El sesgo de la temperatura es 0,294 . El error del factor de escala de la temperatura es 0,02%. Los ejes del sensor están desviados un 2%.
params = accelparams('MeasurementRange',19.6,'Resolution',0.598e-3,'ConstantBias',0.49,'NoiseDensity',3920e-6,'TemperatureBias',0.294,'TemperatureScaleFactor',0.02,'AxesMisalignment',2);
Utilice una frecuencia de muestreo de 100 Hz espaciadas en 1000 muestras. Cree el objeto imuSensor utilizando el objeto de parámetro del acelerómetro.
Fs = 100; numSamples = 1000; t = 0:1/Fs:(numSamples-1)/Fs; imu = imuSensor('SampleRate', Fs, 'Accelerometer', params);
Genere datos del acelerómetro a partir del objeto imuSensor.
orient = quaternion.ones(numSamples, 1); acc = zeros(numSamples, 3); angvel = zeros(numSamples, 3); accelData = imu(acc, angvel, orient);
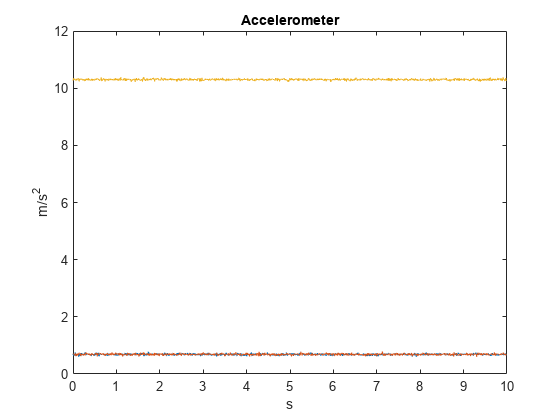
Trazar los datos resultantes del acelerómetro.
plot(t, accelData) title('Accelerometer') xlabel('s') ylabel('m/s^2')