tune
Ajuste los parámetros ahrs10filter para reducir el error de estimación
Sintaxis
Descripción
tunedMeasureNoise = tune(filter,measureNoise,sensorData,groundTruth)ahrs10filter, filter y los ruidos de medición para reducir el error de estimación de estado de raíz cuadrada media (RMS) entre los datos del sensor fusionado y la ground-truth. La función también devuelve el ruido de medición sintonizado, tunedMeasureNoise. La función utiliza los valores de propiedad en el filtro y el ruido de medición proporcionado en la estructura measureNoise como estimación inicial para el algoritmo de optimización.
tunedMeasureNoise = tune(___,config)tunerconfig, config.
Ejemplos
Cargue los datos registrados del sensor y los datos ground-truth.
load('ahrs10filterTuneData.mat');Cree tablas para los datos del sensor y los datos de verdad.
sensorData = table(Accelerometer,Gyroscope,...
Magnetometer,Altimeter);
groundTruth = table(Orientation, Altitude);Crea un objeto de filtro ahrs10filter.
filter = ahrs10filter('State', initialState, ... 'StateCovariance', initialStateCovariance);
Cree un objeto de configuración de sintonizador para el filtro. Establezca las iteraciones máximas en diez y establezca el límite objetivo en 0,001.
cfg = tunerconfig('ahrs10filter','MaxIterations',10,... 'ObjectiveLimit',1e-3);
Utilice la función de ruido del ajustador para obtener un conjunto de ruidos de sensores iniciales utilizados en el filtro
measNoise = tunernoise('ahrs10filter')measNoise = struct with fields:
MagnetometerNoise: 1
AltimeterNoise: 1
Ajusteel filtro y obtenga los parámetros ajustados.
tunedNoise = tune(filter, measNoise, sensorData, ...
groundTruth, cfg); Iteration Parameter Metric
_________ _________ ______
1 AccelerometerNoise 0.0526
1 GyroscopeNoise 0.0526
1 MagnetometerNoise 0.0523
1 AltimeterNoise 0.0515
1 AccelerometerBiasNoise 0.0510
1 GyroscopeBiasNoise 0.0510
1 GeomagneticVectorNoise 0.0510
1 MagnetometerBiasNoise 0.0508
2 AccelerometerNoise 0.0508
2 GyroscopeNoise 0.0508
2 MagnetometerNoise 0.0504
2 AltimeterNoise 0.0494
2 AccelerometerBiasNoise 0.0490
2 GyroscopeBiasNoise 0.0490
2 GeomagneticVectorNoise 0.0490
2 MagnetometerBiasNoise 0.0487
3 AccelerometerNoise 0.0487
3 GyroscopeNoise 0.0487
3 MagnetometerNoise 0.0482
3 AltimeterNoise 0.0472
3 AccelerometerBiasNoise 0.0467
3 GyroscopeBiasNoise 0.0467
3 GeomagneticVectorNoise 0.0467
3 MagnetometerBiasNoise 0.0463
4 AccelerometerNoise 0.0463
4 GyroscopeNoise 0.0463
4 MagnetometerNoise 0.0456
4 AltimeterNoise 0.0446
4 AccelerometerBiasNoise 0.0442
4 GyroscopeBiasNoise 0.0442
4 GeomagneticVectorNoise 0.0442
4 MagnetometerBiasNoise 0.0437
5 AccelerometerNoise 0.0437
5 GyroscopeNoise 0.0437
5 MagnetometerNoise 0.0428
5 AltimeterNoise 0.0417
5 AccelerometerBiasNoise 0.0413
5 GyroscopeBiasNoise 0.0413
5 GeomagneticVectorNoise 0.0413
5 MagnetometerBiasNoise 0.0408
6 AccelerometerNoise 0.0408
6 GyroscopeNoise 0.0408
6 MagnetometerNoise 0.0397
6 AltimeterNoise 0.0385
6 AccelerometerBiasNoise 0.0381
6 GyroscopeBiasNoise 0.0381
6 GeomagneticVectorNoise 0.0381
6 MagnetometerBiasNoise 0.0375
7 AccelerometerNoise 0.0375
7 GyroscopeNoise 0.0375
7 MagnetometerNoise 0.0363
7 AltimeterNoise 0.0351
7 AccelerometerBiasNoise 0.0347
7 GyroscopeBiasNoise 0.0347
7 GeomagneticVectorNoise 0.0347
7 MagnetometerBiasNoise 0.0342
8 AccelerometerNoise 0.0342
8 GyroscopeNoise 0.0342
8 MagnetometerNoise 0.0331
8 AltimeterNoise 0.0319
8 AccelerometerBiasNoise 0.0316
8 GyroscopeBiasNoise 0.0316
8 GeomagneticVectorNoise 0.0316
8 MagnetometerBiasNoise 0.0313
9 AccelerometerNoise 0.0313
9 GyroscopeNoise 0.0313
9 MagnetometerNoise 0.0313
9 AltimeterNoise 0.0301
9 AccelerometerBiasNoise 0.0298
9 GyroscopeBiasNoise 0.0298
9 GeomagneticVectorNoise 0.0298
9 MagnetometerBiasNoise 0.0296
10 AccelerometerNoise 0.0296
10 GyroscopeNoise 0.0296
10 MagnetometerNoise 0.0296
10 AltimeterNoise 0.0285
10 AccelerometerBiasNoise 0.0283
10 GyroscopeBiasNoise 0.0283
10 GeomagneticVectorNoise 0.0283
10 MagnetometerBiasNoise 0.0282
Fusione los datos del sensor utilizando el filtro ajustado.
N = size(sensorData,1); qEstTuned = quaternion.zeros(N,1); altEstTuned = zeros(N,1); for ii=1:N predict(filter,Accelerometer(ii,:),Gyroscope(ii,:)); if all(~isnan(Magnetometer(ii,1))) fusemag(filter, Magnetometer(ii,:),tunedNoise.MagnetometerNoise); end if ~isnan(Altimeter(ii)) fusealtimeter(filter, Altimeter(ii),tunedNoise.AltimeterNoise); end [altEstTuned(ii), qEstTuned(ii)] = pose(filter); end
Calcule los errores RMS.
orientationErrorTuned = rad2deg(dist(qEstTuned, Orientation)); rmsOrientationErrorTuned = sqrt(mean(orientationErrorTuned.^2))
rmsOrientationErrorTuned = 2.2899
positionErrorTuned = altEstTuned - Altitude; rmsPositionErrorTuned = sqrt(mean( positionErrorTuned.^2))
rmsPositionErrorTuned = 0.0199
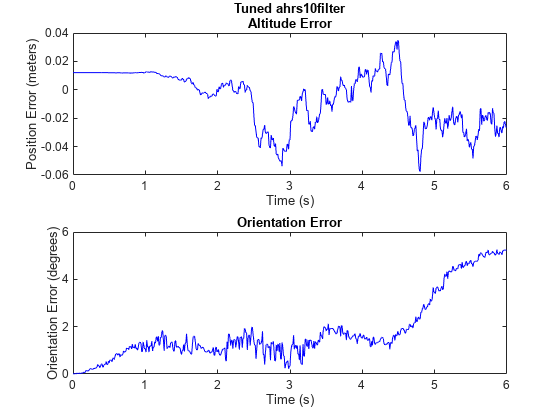
Visualizar los resultados
figure; t = (0:N-1)./ filter.IMUSampleRate; subplot(2,1,1) plot(t, positionErrorTuned, 'b'); title("Tuned ahrs10filter" + newline + ... "Altitude Error") xlabel('Time (s)'); ylabel('Position Error (meters)') subplot(2,1,2) plot(t, orientationErrorTuned, 'b'); title("Orientation Error") xlabel('Time (s)'); ylabel('Orientation Error (degrees)');
Argumentos de entrada
Argumentos de salida
Referencias
[1] Abbeel, P., Coates, A., Montemerlo, M., Ng, A.Y. and Thrun, S. Discriminative Training of Kalman Filters. In Robotics: Science and systems, Vol. 2, pp. 1, 2005.
Historial de versiones
Introducido en R2021a