ahrs10filter
Altura y orientación a partir de lecturas MARG y altímetro.
Descripción
El objeto ahrs10filter fusiona datos del sensor MARG y del altímetro para estimar la altura y la orientación del dispositivo. Los datos MARG (magnéticos, de velocidad angular y de gravedad) generalmente se derivan de sensores de magnetómetro, giroscopio y acelerómetro. El filtro utiliza un vector de estado de 18 elementos para rastrear el cuaternión de orientación, la velocidad vertical, la posición vertical, los sesgos del sensor MARG y el vector geomagnético. El objeto ahrs10filter utiliza un filtro Kalman extendido para estimar estas cantidades.
Creación
Sintaxis
Descripción
FUSE = ahrs10filterFUSE, para la fusión del sensor de lecturas MARG y del altímetro para estimar la altura y la orientación del dispositivo.
FUSE = ahrs10filter('ReferenceFrame',RF)RF.
FUSE = ahrs10filter(___,Name=Value)
Argumentos de entrada
Propiedades
Funciones del objeto
predict | Actualizar estados utilizando datos del acelerómetro y giroscopio para ahrs10filter |
fusemag | Estados correctos utilizando datos del magnetómetro para ahrs10filter |
fusealtimeter | Estados correctos utilizando datos del altímetro para ahrs10filter |
correct | Estados correctos utilizando mediciones de estado directas para ahrs10filter |
residual | Residuos y covarianzas residuales de mediciones de estado directas para ahrs10filter |
residualmag | Residuos y covarianza residual de las mediciones del magnetómetro para ahrs10filter |
residualaltimeter | Residuos y covarianza residual de las mediciones del altímetro para ahrs10filter |
pose | Estimación de la orientación y posición actual para ahrs10filter |
reset | Restablecer estados internos para ahrs10filter |
stateinfo | Mostrar información del vector de estado para ahrs10filter |
tune | Ajuste los parámetros ahrs10filter para reducir el error de estimación |
copy | Crear copia de ahrs10filter |
Ejemplos
Cargue datos de sensores registrados, pose ground-truth y estado inicial y covarianza del estado inicial. Calcule el número de muestras de IMU por muestra de altímetro y el número de muestras de IMU por muestra de magnetómetro.
load('fuse10exampledata.mat', ... 'imuFs','accelData','gyroData', ... 'magnetometerFs','magData', ... 'altimeterFs','altData', ... 'expectedHeight','expectedOrient', ... 'initstate','initcov'); imuSamplesPerAlt = fix(imuFs/altimeterFs); imuSamplesPerMag = fix(imuFs/magnetometerFs);
Cree un filtro AHRS que fusione lecturas de MARG y altímetro para estimar la altura y la orientación. Establezca la frecuencia de muestreo y los ruidos de medición de los sensores. Los valores se determinaron a partir de hojas de datos y experimentación.
filt = ahrs10filter('IMUSampleRate',imuFs, ... 'AccelerometerNoise',0.1, ... 'State',initstate, ... 'StateCovariance',initcov); Ralt = 0.24; Rmag = 0.9;
Preasigne variables a la altura y orientación del registro.
numIMUSamples = size(accelData,1);
estHeight = zeros(numIMUSamples,1);
estOrient = zeros(numIMUSamples,1,'quaternion');Combinar datos de acelerómetro, giroscopio, magnetómetro y altímetro. El bucle externo predice el avance del filtro a la frecuencia de muestreo más rápida (la frecuencia de muestreo de la IMU).
for ii = 1:numIMUSamples % Use predict to estimate the filter state based on the accelometer and % gyroscope data. predict(filt,accelData(ii,:),gyroData(ii,:)); % Magnetometer data is collected at a lower rate than IMU data. Fuse % magnetometer data at the lower rate. if ~mod(ii,imuSamplesPerMag) fusemag(filt,magData(ii,:),Rmag); end % Altimeter data is collected at a lower rate than IMU data. Fuse % altimeter data at the lower rate. if ~mod(ii, imuSamplesPerAlt) fusealtimeter(filt,altData(ii),Ralt); end % Log the current height and orientation estimate. [estHeight(ii),estOrient(ii)] = pose(filt); end
Calcule los errores RMS entre la altura y orientación verdaderas conocidas y la salida del filtro AHRS.
pErr = expectedHeight - estHeight;
qErr = rad2deg(dist(expectedOrient,estOrient));
pRMS = sqrt(mean(pErr.^2));
qRMS = sqrt(mean(qErr.^2));
fprintf('Altitude RMS Error\n');Altitude RMS Error
fprintf('\t%.2f (meters)\n\n',pRMS);0.38 (meters)
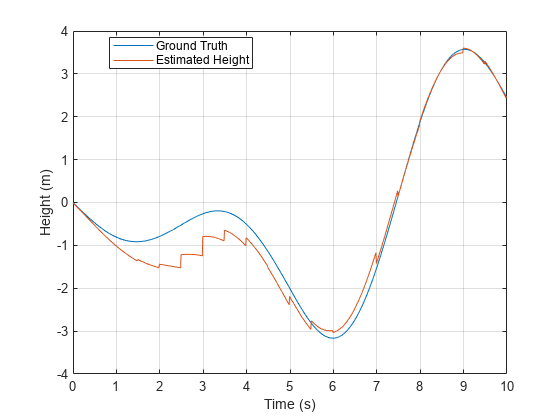
Visualice la altura real y estimada a lo largo del tiempo.
t = (0:(numIMUSamples-1))/imuFs; plot(t,expectedHeight);hold on plot(t,estHeight);hold off legend('Ground Truth','Estimated Height','location','best') ylabel('Height (m)') xlabel('Time (s)') grid on
fprintf('Quaternion Distance RMS Error\n');Quaternion Distance RMS Error
fprintf('\t%.2f (degrees)\n\n',qRMS);2.93 (degrees)
Capacidades ampliadas
Historial de versiones
Introducido en R2019a