allanvar
variación de allan
Sintaxis
Descripción
La varianza de Allan se utiliza para medir la estabilidad de frecuencia de la oscilación de una secuencia de datos en el dominio del tiempo. También se puede utilizar para determinar el ruido intrínseco de un sistema en base al tiempo promediado. La serie temporal de promediado τ se puede especificar como τ = m/fs. Aquí fs es la frecuencia de muestreo de los datos, y m es una lista de factores de promediado en orden ascendente (como 1, 2, 4, 8, …).
[ devuelve la varianza de Allan avar,tau] = allanvar(Omega)avar como una función del tiempo de promediado tau. El tiempo de promediado predeterminado tau es una secuencia de octava dada como (1, 2, ..., 2floor{log2[(N-1)/2]}), donde N es el número de muestras en Omega. Si Omega se especifica como una matriz, allanvar opera sobre las columnas de omega.
Ejemplos
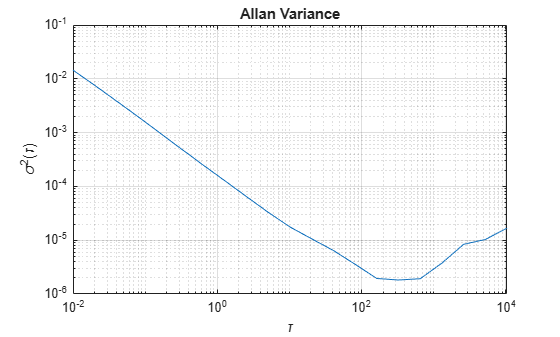
Cargue datos del giroscopio desde un archivo MAT, incluida la frecuencia de muestreo de los datos en Hz. Calcule la varianza de Allan.
load('LoggedSingleAxisGyroscope','omega','Fs') [avar,tau] = allanvar(omega,'octave',Fs);
Representa la varianza de Allan en una gráfica loglog.
loglog(tau,avar) xlabel('\tau') ylabel('\sigma^2(\tau)') title('Allan Variance') grid on
Genere ruido de giroscopio de muestra, incluido el recorrido aleatorio angular ángulo y el recorrido aleatorio de velocidad.
numSamples = 1e6; Fs = 100; nStd = 1e-3; kStd = 1e-7; nNoise = nStd.*randn(numSamples,1); kNoise = kStd.*cumsum(randn(numSamples,1)); omega = nNoise+kNoise;
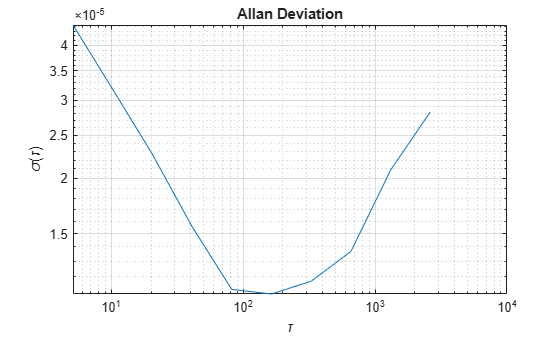
Calcula la desviación de Allan en valores específicos de . La desviación de Allan es la raíz cuadrada de la varianza de Allan.
m = 2.^(9:18); [avar,tau] = allanvar(omega,m,Fs); adev = sqrt(avar);
Representa la desviación de Allan en una gráfica loglog.
loglog(tau,adev) xlabel('\tau') ylabel('\sigma(\tau)') title('Allan Deviation') grid on
Argumentos de entrada
Argumentos de salida
Historial de versiones
Introducido en R2019a