Complementary Filter
Bibliotecas:
Sensor Fusion and Tracking Toolbox /
Multisensor Positioning /
Navigation Filters
Navigation Toolbox /
Multisensor Positioning /
Navigation Filters
Descripción
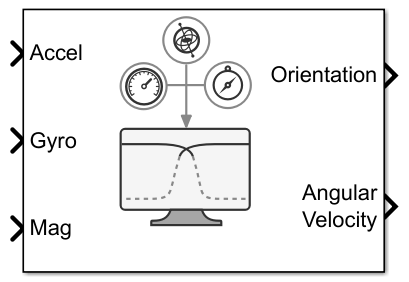
El bloque Complementary Filter Simulink® fusiona datos del sensor acelerómetro, magnetómetro y giroscopio para estimar la orientación del dispositivo.
Puertos
Entrada
Salida
Parámetros
Capacidades ampliadas
Historial de versiones
Introducido en R2023a