complementaryFilter
Estimar la orientación mediante filtro complementario.
Descripción
complementaryFilter System object™ fusiona datos del sensor acelerómetro, giroscopio y magnetómetro para estimar la orientación y la velocidad angular del dispositivo.
Para estimar la orientación usando este objeto:
Cree el objeto
complementaryFiltery configure sus propiedades.Llame al objeto con argumentos, como si fuera una función.
Para más información sobre el funcionamiento de los System objects, consulte ¿Qué son los System Objects?
Creación
Sintaxis
Descripción
FUSE = complementaryFiltercomplementaryFilter System object, FUSE, para la fusión de datos del sensor del acelerómetro, giroscopio y magnetómetro para estimar la orientación y la velocidad angular del dispositivo.
FUSE = complementaryFilter('ReferenceFrame',RF)complementaryFilter System object que fusiona datos del acelerómetro, giroscopio y magnetómetro para estimar la orientación del dispositivo en relación con el marco de referencia RF.
FUSE = complementaryFilter(___,Name=Value)
Argumentos de entrada
Propiedades
Uso
Sintaxis
Descripción
[ fusiona datos del acelerómetro, giroscopio y magnetómetro para calcular la orientación y la velocidad angular. Para utilizar esta sintaxis, establezca la propiedad orientation,angularVelocity] = FUSE(accelReadings,gyroReadings,magReadings)HasMagnetometer como true.
[ fusiona datos del acelerómetro y del giroscopio para calcular la orientación y la velocidad angular. Para utilizar esta sintaxis, establezca la propiedad orientation,angularVelocity] = FUSE(accelReadings,gyroReadings)HasMagnetometer como false.
Argumentos de entrada
Argumentos de salida
Funciones del objeto
Para usar una función de objeto, especifique el System object como el primer argumento de entrada. Por ejemplo, para liberar recursos de sistema de un System object llamado obj, utilice la siguiente sintaxis:
release(obj)
Ejemplos
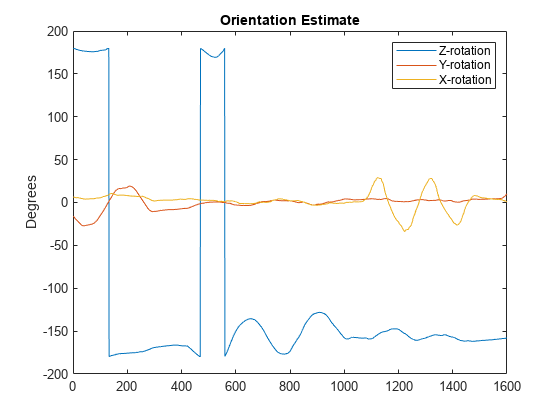
Cargue el archivo rpy_9axis, que contiene datos registrados de los sensores acelerómetro, giroscopio y magnetómetro de un dispositivo que oscila en cabeceo (alrededor del eje y), luego en guiñada (alrededor del eje z) y luego en balanceo (alrededor del eje x). El archivo también contiene la frecuencia de muestreo de la grabación.
ld = load('rpy_9axis.mat');
accel = ld.sensorData.Acceleration;
gyro = ld.sensorData.AngularVelocity;
mag = ld.sensorData.MagneticField;Cree un objeto de filtro complementario con una frecuencia de muestreo igual a la frecuencia de los datos.
Fs = ld.Fs; % Hz fuse = complementaryFilter('SampleRate', Fs);
Fusione los datos del acelerómetro, giroscopio y magnetómetro utilizando el filtro.
q = fuse(accel, gyro, mag);
Visualiza los resultados.
plot(eulerd( q, 'ZYX', 'frame')); title('Orientation Estimate'); legend('Z-rotation', 'Y-rotation', 'X-rotation'); ylabel('Degrees');
Referencias
[1] Valenti, R., I. Dryanovski, and J. Xiao. "Keeping a good attitude: A quaternion-based orientation filter for IMUs and MARGs." Sensors. Vol. 15, Number 8, 2015, pp. 19302-19330.
Capacidades ampliadas
Historial de versiones
Introducido en R2019b