gnssconstellation
Ubicaciones de satélites a una hora específica
Sintaxis
Descripción
[ devuelve las posiciones y velocidades del satélite en satPos,satVel] = gnssconstellation(t)datetime t. La función devuelve posiciones y velocidades en el sistema de coordenadas fijo en la Tierra centrado en la Tierra (ECEF) en metros y metros por segundo, respectivamente. Si no se especifica la zona horaria para la fecha y hora, se supone que es UTC.
[ también especifica el tipo de archivo GNSS del que obtuvo los datos del mensaje de navegación. Esta sintaxis le permite procesar datos de navegación obtenidos de un archivo RINEX, un archivo de almanaque SEM, un archivo de almanaque YUMA o un archivo de almanaque XML de Galileo.satPos,satVel,satID] = gnssconstellation(t,navData,GNSSFileType=gnssFileType)
Nota
La función gnssconstellation determina la posición y las velocidades del satélite propagando los parámetros orbitales actuales especificados por el archivo RINEX, un archivo de almanaque SEM, un archivo de almanaque YUMA o un archivo de almanaque XML de Galileo al momento de la consulta. Para obtener posiciones y velocidades de los satélites más precisas, asegúrese de utilizar el archivo de navegación publicado para el momento en que realiza la consulta. Para obtener más información sobre la validez de los parámetros orbitales, consulte Parámetros orbitales.
Ejemplos
Obtenga las posiciones y velocidades actuales de los satélites GNSS. Acceda a los parámetros orbitales de la especificación de interfaz IS-GPS-200M y calcule la posición y las velocidades en coordenadas ECEF para el tiempo dado. Muestra las posiciones de los satélites.
t = datetime('now','TimeZone','Local'); [satPos,satVel] = gnssconstellation(t); disp(satPos)
1.0e+07 *
-1.5520 -0.2525 2.1405
0.5423 2.5900 -0.2284
0.2566 -2.4927 -0.8802
0.9922 -1.7240 -1.7600
0.2911 1.6265 -2.0794
1.3402 0.8433 -2.1323
-2.1639 1.5257 0.2094
1.0648 -2.0345 1.3346
-2.2359 0.6123 1.2961
-1.8482 0.6245 -1.8023
2.0273 1.4705 -0.8844
2.5235 0.7689 0.3083
-0.1518 -1.6336 2.0887
-1.1371 -2.0948 -1.1717
1.5299 0.9039 1.9740
1.5083 -0.2140 2.1756
-0.8468 1.9435 -1.6000
-0.3982 -2.6259 -0.0173
2.2791 -0.8550 1.0625
-0.7960 2.0090 1.5442
-1.3496 -0.8340 -2.1301
-1.7889 1.8900 0.5310
0.2693 1.6572 2.0580
-2.2860 -1.2656 -0.4762
-2.5315 -0.6135 0.5188
1.6347 -0.8066 -1.9317
2.3845 0.0662 -1.1679
Utilice la función lookangles para obtener los ángulos de acimut y elevación de los satélites para posiciones de satélite y receptor determinadas. Especifique un ángulo de máscara de 5 grados. Obtenga las posiciones de los satélites utilizando la función gnssconstellation.
Especifique una posición del receptor en coordenadas geodésicas (latitud, longitud, altitud).
recPos = [42 -71 50];
Obtenga las posiciones de los satélites para la hora actual.
t = datetime('now');
gpsSatPos = gnssconstellation(t);Especifique un ángulo de máscara de 5 grados.
maskAngle = 5;
Obtenga los ángulos de visión de azimut y elevación para las posiciones de los satélites. La salida vis indica qué satélites están visibles. Obtenga el total usando nnz.
[az,el,vis] = lookangles(recPos,gpsSatPos,maskAngle);
fprintf('%d satellites visible at %s.\n',nnz(vis),t);9 satellites visible at 01-Feb-2025 13:25:21.
Lea un conjunto de satélites GPS del mensaje de navegación GPS en un archivo RINEX.
filename = "GODS00USA_R_20211750000_01D_GN.rnx";
data = rinexread(filename);
gpsData = data.GPS;
[~,satIdx] = unique(gpsData.SatelliteID);
gpsData = gpsData(satIdx,:);Obtenga las posiciones, velocidades e ID de los satélites en el primer paso.
t = gpsData.Time(1); [satPos,satVel,satID] = gnssconstellation(t,gpsData)
satPos = 31×3
107 ×
-1.5630 -0.1882 2.1186
1.3808 2.1970 -0.4861
-2.0061 0.7606 1.5492
-2.5625 -0.0140 -0.7096
1.4896 0.5448 -2.1487
0.6129 2.5407 0.4615
-1.0081 1.3751 -1.9877
-2.5811 -0.6135 -0.3246
-1.9289 0.8690 -1.6134
0.9542 -2.2526 1.0113
2.0186 -0.5308 1.6093
2.0993 1.3376 -0.9594
-1.0551 2.2204 1.0002
2.6312 0.3802 -0.3333
-1.0047 -1.1218 -2.2112
⋮
satVel = 31×3
103 ×
-0.8888 -2.5914 -0.8416
0.0362 0.7543 3.1043
1.1203 -1.6505 2.2591
-0.8301 -0.4385 2.9967
-1.6023 2.1607 -0.5493
-0.3948 -0.4708 3.1591
-1.0322 -2.4133 -1.1748
0.4370 -0.1710 -3.1339
-1.9860 -0.5032 2.1087
0.9968 -0.8308 -2.8502
-1.3152 1.6379 2.1695
-1.2059 -0.1406 -2.8610
-1.0488 0.7681 -2.8132
-0.3937 0.3259 -3.0428
1.9524 -1.9313 0.1383
⋮
satID = 31×1
1
2
3
4
5
6
7
8
9
10
12
13
14
15
16
⋮
Leer datos de mensajes de navegación GPS de un archivo de almanaque SEM.
data = semread("semalmanac_2022-4-10.al3")data=31×16 timetable
Time GPSWeekNumber GPSTimeOfApplicability PRNNumber SVN AverageURANumber Eccentricity InclinationOffset RateOfRightAscension SqrtOfSemiMajorAxis GeographicLongitudeOfOrbitalPlane ArgumentOfPerigee MeanAnomaly ZerothOrderClockCorrection FirstOrderClockCorrection SatelliteHealth SatelliteConfiguration
____________________ _____________ ______________________ _________ ___ ________________ ____________ _________________ ____________________ ___________________ _________________________________ _________________ ___________ __________________________ _________________________ _______________ ______________________
12-Apr-2022 16:50:54 2205 2.3347e+05 1 63 0 0.01171 0.014391 -2.4484e-09 5153.6 -0.9271 0.28359 -0.23387 0.00038624 -7.276e-12 0 11
12-Apr-2022 16:50:54 2205 2.3347e+05 2 61 0 0.020515 0.0074596 -2.5029e-09 5153.6 -0.95587 -0.45355 -0.18869 -0.00065327 0 0 9
12-Apr-2022 16:50:54 2205 2.3347e+05 3 69 0 0.0040326 0.0096912 -2.5757e-09 5153.6 -0.59787 0.29979 -0.59118 -0.00020409 -1.4552e-11 0 11
12-Apr-2022 16:50:54 2205 2.3347e+05 4 74 0 0.0017715 0.0059814 -2.4665e-09 5153.6 -0.25353 -0.95004 0.31619 -0.00017643 3.638e-12 0 12
12-Apr-2022 16:50:54 2205 2.3347e+05 5 50 0 0.0059118 0.0055599 -2.6193e-09 5153.6 -0.61097 0.32122 0.61334 -7.8201e-05 0 0 10
12-Apr-2022 16:50:54 2205 2.3347e+05 6 67 0 0.0026565 0.014187 -2.452e-09 5153.7 -0.92973 -0.28158 -0.1523 0.00026417 1.4552e-11 0 11
12-Apr-2022 16:50:54 2205 2.3347e+05 7 48 0 0.015865 0.0028152 -2.5138e-09 5153.6 0.07053 -0.72524 -0.44853 0.00032043 0 0 10
12-Apr-2022 16:50:54 2205 2.3347e+05 8 72 0 0.0074387 0.0068531 -2.4738e-09 5153.7 0.72894 0.048076 0.467 -6.3896e-05 0 0 11
12-Apr-2022 16:50:54 2205 2.3347e+05 9 68 0 0.0021076 0.0037479 -2.5029e-09 5153.5 -0.27053 0.59743 0.61325 -0.00034428 3.638e-12 0 11
12-Apr-2022 16:50:54 2205 2.3347e+05 10 73 0 0.0075555 0.0096321 -2.5793e-09 5153.6 -0.59875 -0.79359 -0.88495 -0.0003767 -1.0914e-11 0 11
12-Apr-2022 16:50:54 2205 2.3347e+05 11 78 0 0.00031376 0.0064716 -2.5393e-09 5153.7 -0.9136 0.85276 0.49013 -4.1962e-05 7.276e-12 63 12
12-Apr-2022 16:50:54 2205 2.3347e+05 12 58 0 0.0087256 0.008585 -2.5575e-09 5153.5 0.42482 0.40497 -0.64747 -0.00019932 -7.276e-12 0 10
12-Apr-2022 16:50:54 2205 2.3347e+05 13 43 0 0.0058503 0.0083656 -2.4374e-09 5153.6 -0.22159 0.29646 0.31699 0.00029278 7.276e-12 0 9
12-Apr-2022 16:50:54 2205 2.3347e+05 14 77 0 0.0016966 0.0033073 -2.6121e-09 5153.6 0.41456 0.97049 -0.63662 -0.00010204 -3.638e-12 0 12
12-Apr-2022 16:50:54 2205 2.3347e+05 15 55 0 0.013989 -0.003952 -2.5866e-09 5153.7 -0.30476 0.34521 0.16087 -6.9618e-05 3.638e-12 0 10
12-Apr-2022 16:50:54 2205 2.3347e+05 16 56 0 0.012782 0.0085545 -2.5611e-09 5153.6 0.43073 0.23073 0.76066 -0.00049114 -3.638e-12 0 9
⋮
Obtenga las posiciones, velocidades e ID de los satélites en el primer paso.
t = data.Time(1);
[satPos,satVel,satID] = gnssconstellation(t,data,GNSSFileType="SEM")satPos = 31×3
107 ×
1.3899 -2.2151 0.3074
-1.6755 0.5872 -1.9147
1.5377 -1.2781 -1.7528
0.6332 -1.6385 -1.9887
-2.5716 0.5413 0.4215
-1.0251 -1.1336 -2.1646
0.2694 -2.3585 1.1775
1.3414 -0.7139 2.1761
-0.3881 -2.2626 -1.3395
1.5043 1.1879 1.8656
-1.7866 0.4175 -1.9205
-1.9188 1.0246 -1.5421
-1.6711 -0.2575 2.0374
-1.3516 -1.3127 1.8746
-1.2509 0.9486 2.1022
⋮
satVel = 31×3
103 ×
0.0014 0.4854 3.2261
0.8625 -2.4217 -1.4348
2.2113 0.0321 1.9394
1.4081 2.1049 -1.2936
-0.5761 -0.2150 -3.1036
1.2999 -2.4327 0.6643
0.9229 -1.1620 -2.6758
1.5581 2.2893 -0.1743
1.1480 1.2668 -2.4877
-2.3150 0.2417 1.6982
1.1085 -2.1747 -1.5056
-1.9099 -0.2154 2.2852
-1.0411 -2.3996 -1.1323
2.3787 -0.1846 1.5773
-1.7983 -2.1160 -0.0817
⋮
satID = 31×1
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
⋮
Lea los datos de los mensajes de navegación GPS de un archivo de almanaque de YUMA.
data = yumaread("yumaAlmanac_2022-9-27.alm")data=31×13 timetable
Time PRN Health Eccentricity TimeOfApplicability OrbitalInclination RateOfRightAscen SQRTA RightAscenAtWeek ArgumentOfPerigee MeanAnom Af0 Af1 Week
____________________ ___ ______ ____________ ___________________ __________________ ________________ ______ ________________ _________________ ________ ___________ __________ ____
29-Sep-2022 16:38:06 1 0 0.012008 4.055e+05 0.98891 -7.5432e-09 5153.6 0.3651 0.9438 -1.095 0.00027561 -7.276e-12 2229
29-Sep-2022 16:38:06 2 0 0.02 4.055e+05 0.96685 -7.7946e-09 5154.9 0.27125 -1.393 -1.6195 -0.00064468 0 2229
29-Sep-2022 16:38:06 3 0 0.0044999 4.055e+05 0.97519 -7.726e-09 5153.5 1.3977 1.0651 -2.1966 -0.00035858 -3.638e-12 2229
29-Sep-2022 16:38:06 4 0 0.0020423 4.055e+05 0.96187 -7.966e-09 5153.7 2.4795 -3.1045 0.81839 -0.00011158 7.276e-12 2229
29-Sep-2022 16:38:06 5 0 0.0060811 4.055e+05 0.96224 -7.8403e-09 5153.7 1.3543 1.1188 1.415 -9.8228e-05 0 2229
29-Sep-2022 16:38:06 6 0 0.0024514 4.055e+05 0.98822 -7.5546e-09 5153.5 0.35683 -0.8974 -0.87447 0.00047684 1.0914e-11 2229
29-Sep-2022 16:38:06 7 0 0.016406 4.055e+05 0.95104 -7.7832e-09 5153.6 -2.7871 -2.2412 -1.7241 0.00030327 -3.638e-12 2229
29-Sep-2022 16:38:06 8 0 0.0075631 4.055e+05 0.96192 -8.2403e-09 5153.5 -0.71955 0.16395 1.1555 -8.6784e-05 0 2229
29-Sep-2022 16:38:06 9 0 0.0025387 4.055e+05 0.95495 -8.0575e-09 5153.7 2.4248 1.9083 1.5732 -0.00028992 3.638e-12 2229
29-Sep-2022 16:38:06 10 0 0.0079675 4.055e+05 0.97498 -7.7489e-09 5153.6 1.395 -2.5116 -3.0858 -5.722e-06 0 2229
29-Sep-2022 16:38:06 11 0 0.00075054 4.055e+05 0.96415 -7.7832e-09 5153.6 0.40358 -3.1036 0.81271 -2.0981e-05 -3.638e-12 2229
29-Sep-2022 16:38:06 12 0 0.0085082 4.055e+05 0.96755 -7.966e-09 5153.7 -1.6731 1.3158 -2.4318 -0.0002861 -7.276e-12 2229
29-Sep-2022 16:38:06 13 0 0.0065126 4.055e+05 0.96921 -7.8518e-09 5153.6 2.5812 0.94039 0.67456 0.00039673 7.276e-12 2229
29-Sep-2022 16:38:06 14 0 0.002305 4.055e+05 0.95095 -8.1261e-09 5153.6 -1.708 -3.0302 -2.4903 -0.00010014 3.638e-12 2229
29-Sep-2022 16:38:06 15 0 0.014625 4.055e+05 0.93093 -8.3203e-09 5153.6 2.3127 1.1401 0.17435 -2.4796e-05 3.638e-12 2229
29-Sep-2022 16:38:06 16 0 0.012809 4.055e+05 0.96738 -7.9889e-09 5153.7 -1.6547 0.73255 2.0697 -0.00052547 0 2229
⋮
Obtenga las posiciones, velocidades e ID de los satélites en el primer paso.
t = data.Time(1);
[satPos,satVel,satID] = gnssconstellation(t,data,GNSSFileType="YUMA")satPos = 31×3
107 ×
-1.3549 2.2358 -0.3793
1.4926 -2.1942 -0.1952
-1.2477 1.2357 -2.0018
-0.4096 2.0385 -1.6467
2.2427 -0.7207 1.2218
1.4711 0.4089 -2.1680
-0.0841 2.0989 1.6373
-1.0615 1.1949 2.1111
0.5989 2.4816 -0.7333
-1.9686 -1.1518 1.4018
1.9842 -0.6457 -1.6411
1.3664 -1.1517 -1.9882
1.4721 -0.2873 2.1756
1.7638 1.3202 1.4920
0.9458 -1.3494 2.0339
⋮
satVel = 31×3
103 ×
-0.4388 0.2295 3.2113
0.0460 0.4065 -3.1646
-2.4900 -0.3576 1.3500
-0.9647 -1.8691 -2.0833
1.5583 0.3175 -2.6224
-1.6003 2.2475 -0.6531
-1.3741 1.5034 -2.0994
-1.2344 -2.3991 0.7711
-0.6518 -0.7124 -2.9785
1.7466 0.0160 2.4627
-1.1680 1.7362 -2.0987
2.4120 0.5344 1.3766
0.7821 2.6885 -0.1548
-1.9034 -0.0429 2.2785
1.5170 2.2368 0.7915
⋮
satID = 31×1
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
⋮
Leer datos de navegación de un archivo de almanaque Galileo y utilizar los datos de navegación para:
Obtenga posiciones, velocidades e identificaciones de satélites en una marca de tiempo determinada.
Calcule la visibilidad del satélite y los ángulos de visión para una posición determinada del receptor utilizando las posiciones de los satélites extraídas.
Primero, lea los datos de los mensajes de navegación GPS de un archivo de almanaque de Galileo.
filename = "galAlmanac_2019-08-06.xml";
data = galalmanacread(filename)data=22×16 timetable
Time SVID aSqRoot ecc deltai omega0 omegaDot w m0 af0 af1 iod t0a wna statusE5a statusE5b statusE1B
____________________ ____ ________ __________ __________ ________ ___________ ________ _________ ___________ ___________ ___ _________ ____ _________ _________ _________
06-Aug-2019 08:39:42 1 0.011719 0.00022888 0.0030518 -0.11984 -1.8626e-09 -0.81259 -0.053925 -0.00066185 -7.276e-12 4 2.04e+05 1041 0 0 0
06-Aug-2019 08:39:42 2 0.017578 0.00010681 0.0030518 -0.11984 -1.8626e-09 -0.50497 0.63766 7.2479e-05 0 4 2.04e+05 1041 0 0 0
06-Aug-2019 08:39:42 3 0.042969 0.00036621 -0.0076904 -0.78656 -1.7462e-09 -0.1449 0.94464 -0.00019646 -3.638e-12 4 2.04e+05 1041 0 0 0
06-Aug-2019 08:39:42 4 0.039062 0.00027466 -0.0076904 -0.78653 -1.7462e-09 -0.40698 -0.041412 -0.00033951 -7.276e-12 4 2.04e+05 1041 0 0 0
06-Aug-2019 08:39:42 5 0.042969 0.00021362 -0.0076904 -0.78656 -1.7462e-09 -0.33777 -0.61145 -0.00045967 3.638e-12 4 2.04e+05 1041 0 0 0
06-Aug-2019 08:39:42 7 0.042969 0.00041199 -0.0076904 -0.78656 -1.7462e-09 -0.285 0.58496 -0.00024033 -7.276e-12 4 2.04e+05 1041 0 0 0
06-Aug-2019 08:39:42 8 0.039062 0.00036621 -0.0057983 -0.789 -1.7462e-09 -0.19412 0.74414 0.0063114 -7.276e-12 4 2.04e+05 1041 0 0 0
06-Aug-2019 08:39:42 9 0.039062 0.00045776 -0.0057983 -0.789 -1.7462e-09 -0.21506 -0.4855 0.0063572 -1.0914e-11 4 2.04e+05 1041 0 0 0
06-Aug-2019 08:39:42 11 0.017578 0.00038147 0.0021973 0.54333 -1.7462e-09 0.28098 -0.3125 0.0056324 -1.0914e-11 4 2.04e+05 1041 0 0 0
06-Aug-2019 08:39:42 12 0.015625 0.0002594 0.0021973 0.54333 -1.7462e-09 0.10056 0.12363 0.0062618 -1.819e-11 4 2.04e+05 1041 0 0 0
06-Aug-2019 08:39:42 13 0.021484 1.5259e-05 0.0032349 0.54181 -1.7462e-09 0.23178 0.73837 0.00039101 0 4 2.04e+05 1041 0 0 0
06-Aug-2019 08:29:42 15 0.017578 3.0518e-05 0.0032349 0.54178 -1.7462e-09 -0.60843 -0.19565 0.00090027 0 3 2.034e+05 1041 0 0 0
06-Aug-2019 08:39:42 19 0.027344 0.00024414 -0.0058594 -0.78732 -1.7462e-09 -0.47565 0.30069 -3.8147e-06 0 4 2.04e+05 1041 0 0 0
06-Aug-2019 08:39:42 21 0.021484 0.00022888 0.0029297 -0.12067 -1.8626e-09 -0.91656 0.30164 -0.00054741 -3.638e-12 4 2.04e+05 1041 0 0 0
06-Aug-2019 08:39:42 24 0.011719 0.00024414 0.0022583 -0.11884 -1.8626e-09 0.27414 0.35886 0.0059395 -1.819e-11 4 2.04e+05 1041 0 0 0
06-Aug-2019 08:39:42 25 0.027344 0.00032043 0.0029297 -0.1207 -1.8626e-09 -0.7215 -0.89252 0.0017204 -1.0914e-11 4 2.04e+05 1041 0 0 0
⋮
Especifique la marca de tiempo para buscar las posiciones, velocidades e ID de los satélites.
t = datetime(2021,06,24,01,59,44)
t = datetime
24-Jun-2021 01:59:44
Obtenga las posiciones, velocidades e identificaciones del satélite en la marca de tiempo especificada utilizando la función gnssconstellation.
[satPos,satVel,satID] = gnssconstellation(t,data,GNSSFileType="galalmanac");Especifique una posición del receptor en coordenadas geodésicas (latitud, longitud, altitud) para calcular los ángulos de visión y la visibilidad del satélite.
recPos = [42.3013162 -71.3782972 0];
Especifique el ángulo de la máscara de elevación para el receptor.
maskAngle = 5;
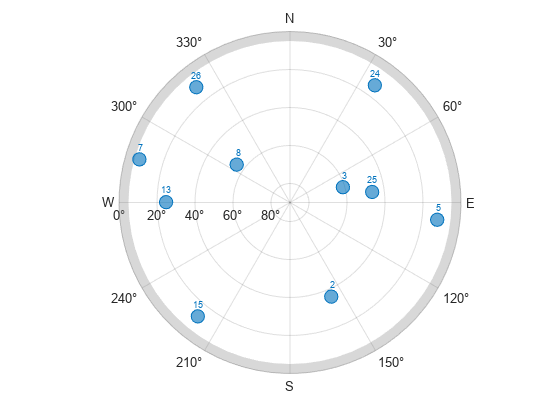
Calcule los ángulos de visión y las visibilidades de las posiciones de los satélites para la posición del receptor dada. La salida vis indica qué satélites están visibles. Obtenga el total usando nnz.
[az,el,vis] = lookangles(recPos,satPos,maskAngle);
fprintf('%d satellites visible at %s.\n',nnz(vis),t)10 satellites visible at 24-Jun-2021 01:59:44.
Trazar las posiciones de los satélites visibles con la máscara de elevación.
figure skyplot(az(vis),el(vis),satID(vis),MaskElevation=maskAngle)
Argumentos de entrada
Argumentos de salida
Más acerca de
Referencias
[1] Groves, Paul D. Principles of GNSS, Inertial, and Multisensor Integrated Navigation Systems. Boston: Artech House, 2013.
[2] International GNSS Service (IGS), Daily 30-Second GPS Broadcast Ephemeris Data, NASA Crustal Dynamics Data Information System (CDDIS), Greenbelt, MD, USA, Jun. 24, 2021. Accessed Jun. 25, 2021. https://dx.doi.org/10.5067/GNSS/gnss_daily_n_001.
[3] United States Coast Guard. "GPS Almanacs, NANUs, and OPS Advisories Archives." US Coast Guard Navigation Center. Accessed May 6, 2022. https://www.navcen.uscg.gov/archives.
[4] QZSS almanac archives, Quasi-Zenith Satellite System(QZSS). "QZSS (Quasi-Zenith Satellite System) - Cabinet Office (Japan)" Accessed September 20, 2022. https://sys.qzss.go.jp/dod/en/archives/pnt.html.
[5] European GNSS Service Centre (GSC). "Galileo Open Service Signal-In-Space Interface Control Document." Accessed March 13, 2023. https://www.gsc-europa.eu/sites/default/files/sites/all/files/Galileo_OS_SIS_ICD_v2.1.pdf.
Capacidades ampliadas
Historial de versiones
Introducido en R2021aConsulte también
Objetos
Funciones
skyplot|lookangles|pseudoranges|receiverposition|rinexread|rinexinfo|semread|yumaread|galalmanacread