dist.
Distancia angular en radianes
Sintaxis
Descripción
distance = dist(quatA,quatB)quatA y quatB.
Ejemplos
Argumentos de entrada
Argumentos de salida
Algoritmos
La función dist devuelve la distancia angular entre dos cuaterniones.
Un cuaternión puede definirse por un eje (ub,uc,ud) y un ángulo de rotación θq: .
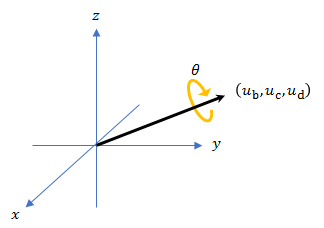
Dado un cuaternión en la forma , donde a es la parte real, puedes resolver el ángulo de q como .
Consideremos dos cuaterniones, p y q, y el producto . A medida que p se aproxima a q, el ángulo de z tiende a 0 y z se aproxima al cuaternión unidad.
La distancia angular entre dos cuaterniones se puede expresar como .
Utilizando la sintaxis del tipo de datos quaternion, la distancia angular se calcula como:
angularDistance = 2*acos(abs(parts(p*conj(q))));
Capacidades ampliadas
Historial de versiones
Introducido en R2019b